
第一,伺服配线的介绍
轴用的是台达的 B3 – L 系列的伺服,接下来是伺服 IO 的接线。

伺服的输入一般会接上 Son 使能、Emgs 急停,特殊情况下还会接 Arst 解除异常,通过外部控制来清除伺服出现的异常,这样就不用重新断电啦。PL 正限位、NL 负限位得根据特殊的控制需求来决定是不是要接线。
那脉冲型伺服是咋控制的呢?一般要接/Plus-、/Sign-,一般会接入到 PLC 的高速输出口。B3、B2 的伺服都有 5vDC 和 24vDC 的控制线,把/Plus+、/Sign+接到 5vDC 或者 24vDC 的正极就行。通过上位机 PLC 发脉冲,就能实现伺服的控制还有运动。至于伺服的输出线,一般会接 ALRM 异常、SRDY 是否准备好,用来检测伺服的状态。要是有异常,能马上通知操作员,让他们处理异常。
要是想了解伺服的详细情况,可以查阅台达 B3-L 伺服的手册,在下载中心 – 台达官网(delta-china.com.cn)就能找到。
第二,PLC控制伺服的程序
目前开始介绍怎么写一个控制轴的程序,后来要是有其他轴,也能照着这个例子来写。

区段 2 是接通伺服的使能 Son ,要是没什么异常,就能正常驱动伺服。
区段 3 是接通伺服的急停 Emgs ,接到机台的急停那里就行。要是急停被按下,伺服就没法动作了。
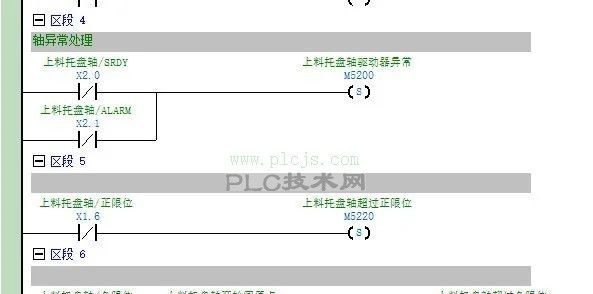
区段 4 呢,如果伺服自身出现异常,/SRDY 和/ALRM 会同时反馈到 PLC 的输入点,这样就能触发 M5200 继电器进行报警,同时也会断开使能。
区段 5 是,当伺服超过了正限位,就能触发 M5220 继电器,告知咱们轴超过正限位发生异常了,同时也会断开使能。
区段 6 是负限位的异常,跟正限位是一个道理。

区段 7 和区段 8 是轴回原可运行中继和轴可移动中继,这儿接的是 SM400 常接通触电。SM400 是 AS300 的特殊继电器,起着常导通的作用。这里的程序是为了防止结构上发生撞击做的一个预处理。列如说伺服带着的是升降气缸,这儿就能够加入升降气缸的原限位,当升降气缸在原限位的时候,伺服才能够移动。
区段 9 是在伺服有异常,或者急停的情况下,把伺服控制的所有状态都重置了,列如说重置了伺服回原完成的标志,能让操作员进行重新回原的操作。
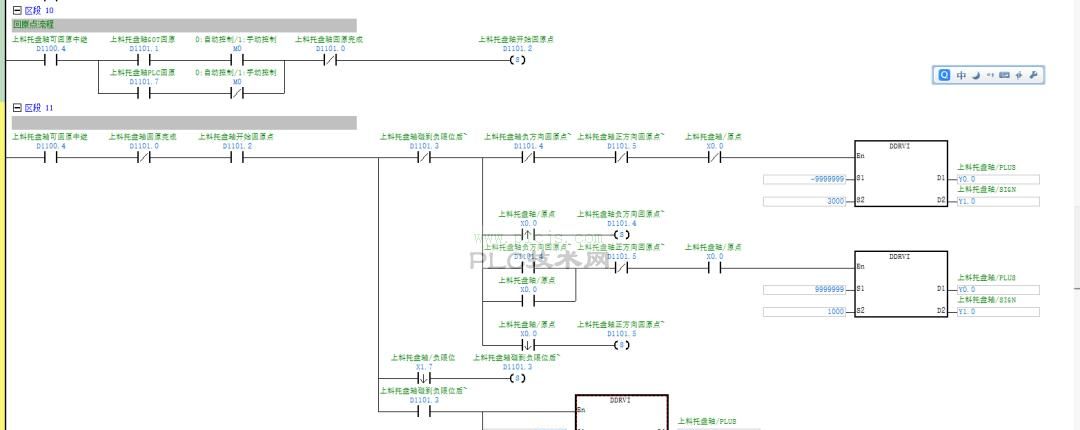
区段 10 到区段 13 是我自己弄的回原程序。区段 10 呢,既可以手动触摸触发(D1101.1 GOT 回原中继),也能在程序自动运行流程中触发(D1101.7 PLC 回原中继),是根据 M0(0 表明自动控制,1 表明手动控制)来控制的。这两种情况都能触发 D1101.2 开始进行回原的程序。
区段 11 里面,有三段程序。第一,正常情况下,伺服在原点和正限位之间,所以是 D1101.4 进行反方向寻找原点上升沿信号,当触发原点上升沿的时候,接着就触发 D1101.5 进行正反向寻找原点下降沿信号,然后就停止运动,回原就完成了。不过还有一种情况,就是当伺服位置在原点和负限位之间,进行第一段反方向寻找原点上升沿信号的时候,会先触发负限位下降沿信号,然后进行 D1101.3,接着正方向寻找原点,之后才会继续触发 D1101.4 和 D1101.5,完成前面说的那些动作。
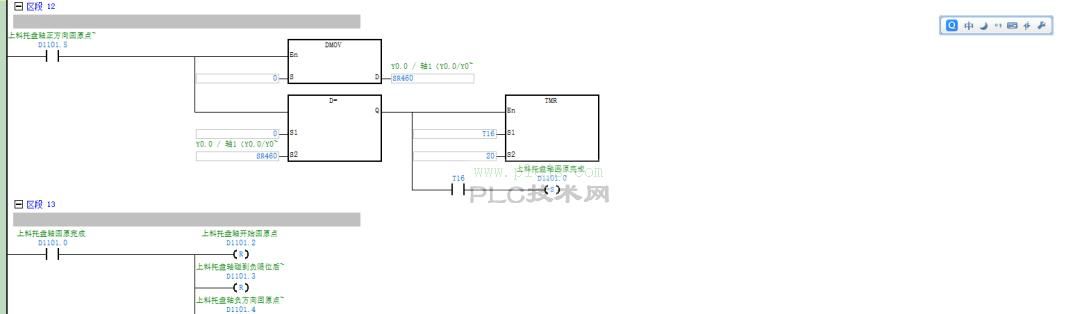
区段 12 是由于这是我自己写的回原指令,所以得自己清除 Y0.0 的当前位置特殊寄存器 SR460(Y0.0 / 轴 1(Y0.0/Y0.1)的当前输出位置(单位:脉冲个数)(32 位))。这里的 Y0.0 是 AS300 的高速输出脉冲口,一般是 Y0.0 和 Y0.1 一块儿用,Y0.0 接伺服的/PLUS 控制脉冲,Y0.1 接伺服的/SIGN 控制方向。但是这样的话,AS300 就只能控制六轴,要是想控制十二轴,就得把它们分开。
区段 13 是把 SR460 归零后,处理回原过程中用到的中间继电器。D 虽说属于寄存器,不过 D0 能够分成 D0.0 到 D0.15 ,变成 16 个中间继电器。

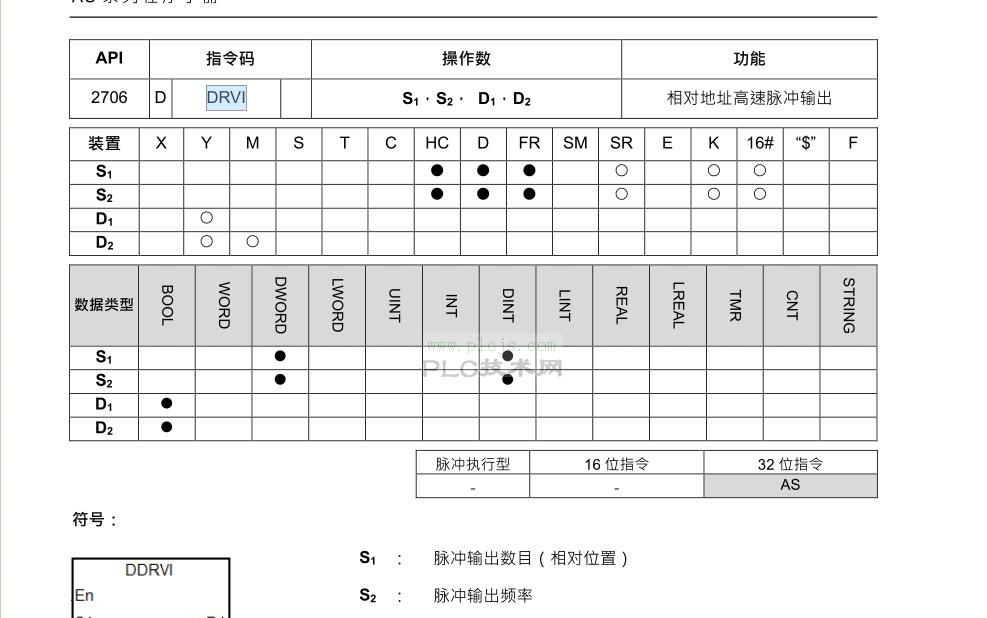
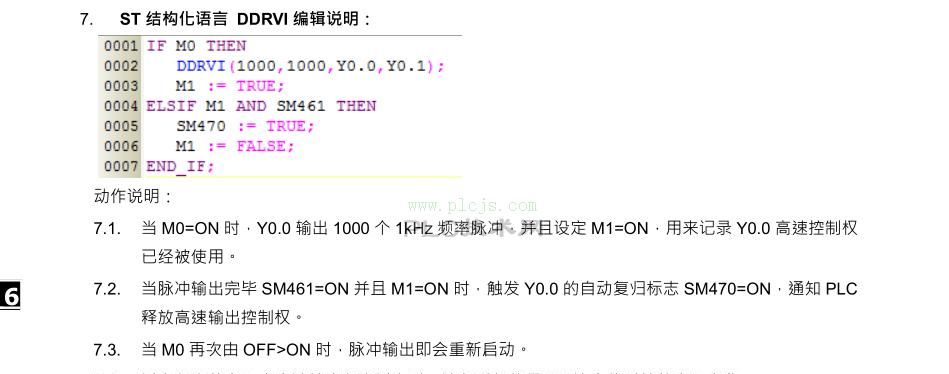
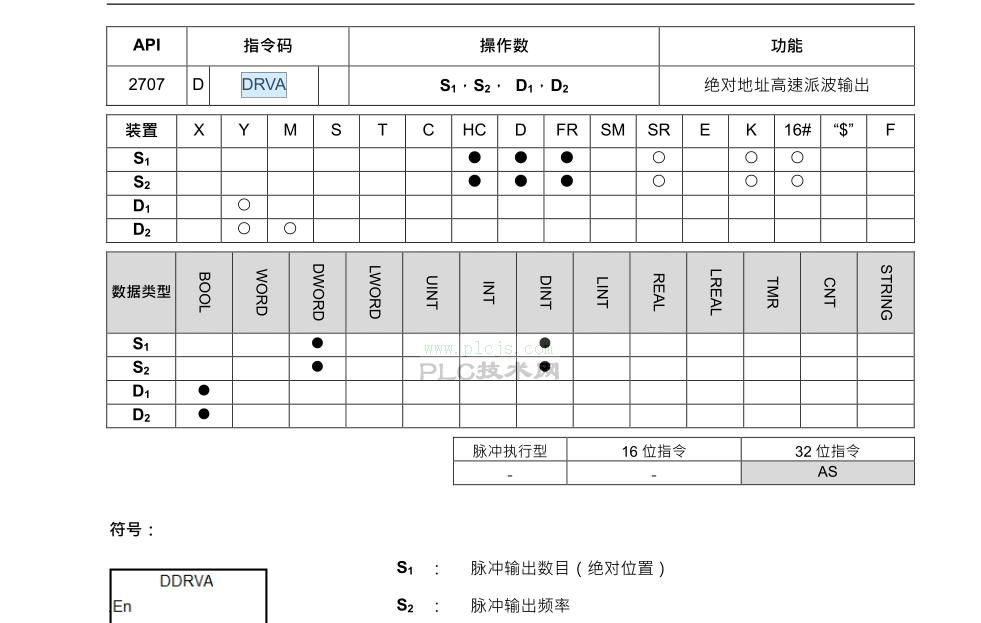
区段 14 是在手动的情况下,M0 等于 TRUE ,能在触摸屏上对伺服进行正反转的控制。D22000 是轴手动运动速度的寄存器。下面是 DDRVI(Relative 相对)的使用说明,可以去查看 AS 系列的编程手册(在下载中心 – 台达官网 (delta-china.com.cn) )。
以下是另一种ST语言关于DDRVI语句的扩展:
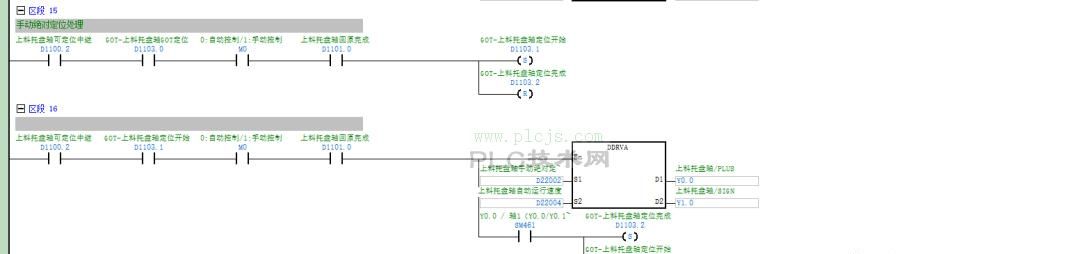
区段 15 和区段 16 是触摸控制绝对定位 DDRVA(absolutely 绝对)的指令。同时由 D1103.0 进行触发,接着触发指令动作,等到运行完成,SM461(Y0.0 / 轴 1(Y0.0/Y0.1)输出执行完毕标志)这个特殊继电器,会通知定位完成。
D22002 是手动定位的位置,D22004 是轴自动的运行速度。(PLC 如何控制轴进行 1mm 的移动,后面会有文章详细讲。)

区段 17 呢,是在自动运行的时候,自动运行的流程会通过控制像 D1120.0 到 D1120.15 这样的中间继电器,来触发 DDRVA 指令去运行。D22006 是自动运行时的绝对定位位置,它跟手动定位位置是分开的。这是为了防止操作员手动控制轴之后,又忘了把伺服移动到自动运行状态下应该运行的位置。所以呢,就会有一个和 SR460 对比的提醒,这就是区段 18 的作用啦。

区段 19 呢,是在手动状态下,把触摸屏界面上想要定位的位置发送给 D22002 手动绝对定位位置,是通过 D1110.0 到 D1119.15 来进行发送的,然后再通过区段 15 去触发指令。
好啦,程序的介绍就到这儿了,大家可以自己瞅瞅,一起讨论讨论,或者自己加些新的程序进去。
台达AS300-轴控制 PLC论坛-全力打造可编程控制器专业技术论坛 –
http://bbs.plcjs.com/forum.php?mod=viewthread&tid=503873&fromuid=42656
(出处: PLC论坛-全力打造可编程控制器专业技术论坛)
#非标自动化#
#台达#























- 最新
- 最热
只看作者