
块设备是针对存储设备的,比如 SD 卡、 EMMC、 NAND Flash、 Nor Flash、 SPI Flash、机械硬盘、固态硬盘等。因此块设备驱动其实就是这些存储设备驱动,块设备驱动相比字符设备驱动的主要区别如下:
①、块设备只能以块为单位进行读写访问,块是 linux 虚拟文件系统(VFS)基本的数据传输单位。字符设备是以字节为单位进行数据传输的,不需要缓冲。
②、块设备在结构上是可以进行随机访问的,对于这些设备的读写都是按块进行的,块设备使用缓冲区来暂时存放数据,等到条件成熟以后在一次性将缓冲区中的数据写入块设备中。
这么做的目的为了提高块设备寿命,大家如果仔细观察的话就会发现有些硬盘或者 NAND Flash就会标明擦除次数(flash 的特性,写之前要先擦除),比如擦除 100000 次等。因此,为了提高块设备寿命而引入了缓冲区,数据先写入到缓冲区中,等满足一定条件后再一次性写入到真正的物理存储设备中,这样就减少了对块设备的擦除次数,提高了块设备寿命。字符设备是顺序的数据流设备,字符设备是按照字节进行读写访问的。字符设备不需要缓冲区,对于字符设备的访问都是实时的,而且也不需要按照固定的块大小进行访问。块设备结构的不同其 I/O 算法也会不同,比如对于 EMMC、 SD 卡、 NAND Flash 这类没有任何机械设备的存储设备就可以任意读写任何的扇区(块设备物理存储单元)。但是对于机械硬盘这样带有磁头的设备,读取不同的盘面或者磁道里面的数据,磁头都需要进行移动,因此对于机械硬盘而言,将那些杂乱的访问按照一定的顺序进行排列可以有效提高磁盘性能, linux 里面针对不同的存储设备实现了不同的 I/O 调度算法。
块设备驱动框架
block_device 结构体
linux 内 核 使 用 block_device 表 示 块 设 备 , block_device 为 一 个 结 构 体,结构体内容如下:
struct block_device {
sector_t bd_start_sect;
sector_t bd_nr_sectors;
struct disk_stats __percpu *bd_stats;
unsigned long bd_stamp;
bool bd_read_only; /* read-only policy */
dev_t bd_dev;
atomic_t bd_openers;
struct inode * bd_inode; /* will die */
struct super_block * bd_super;
void * bd_claiming;
struct device bd_device;
void * bd_holder;
int bd_holders;
bool bd_write_holder;
struct kobject *bd_holder_dir;
u8 bd_partno;
spinlock_t bd_size_lock; /* for bd_inode->i_size updates */
struct gendisk * bd_disk;
struct request_queue * bd_queue;
/* The counter of freeze processes */
int bd_fsfreeze_count;
/* Mutex for freeze */
struct mutex bd_fsfreeze_mutex;
struct super_block *bd_fsfreeze_sb;
struct partition_meta_info *bd_meta_info;
#ifdef CONFIG_FAIL_MAKE_REQUEST
bool bd_make_it_fail;
#endif
}gendisk 结构体
linux 内核使用 gendisk 来描述一个磁盘设备,这是一个结构体,内容如下:
struct gendisk {
/*
* major/first_minor/minors should not be set by any new driver, the
* block core will take care of allocating them automatically.
*/
int major;
int first_minor;
int minors;
char disk_name[DISK_NAME_LEN]; /* name of major driver */
unsigned short events; /* supported events */
unsigned short event_flags; /* flags related to event processing */
struct xarray part_tbl;
struct block_device *part0;
const struct block_device_operations *fops;
struct request_queue *queue;
void *private_data;
struct bio_set bio_split;
int flags;
unsigned long state;
#define GD_NEED_PART_SCAN 0
#define GD_READ_ONLY 1
#define GD_DEAD 2
#define GD_NATIVE_CAPACITY 3
#define GD_ADDED 4
#define GD_SUPPRESS_PART_SCAN 5
#define GD_OWNS_QUEUE 6
struct mutex open_mutex; /* open/close mutex */
unsigned open_partitions; /* number of open partitions */
struct backing_dev_info *bdi;
struct kobject *slave_dir;
#ifdef CONFIG_BLOCK_HOLDER_DEPRECATED
struct list_head slave_bdevs;
#endif
struct timer_rand_state *random;
atomic_t sync_io; /* RAID */
struct disk_events *ev;
#ifdef CONFIG_BLK_DEV_INTEGRITY
struct kobject integrity_kobj;
#endif /* CONFIG_BLK_DEV_INTEGRITY */
#ifdef CONFIG_BLK_DEV_ZONED
/*
* Zoned block device information for request dispatch control.
* nr_zones is the total number of zones of the device. This is always
* 0 for regular block devices. conv_zones_bitmap is a bitmap of nr_zones
* bits which indicates if a zone is conventional (bit set) or
* sequential (bit clear). seq_zones_wlock is a bitmap of nr_zones
* bits which indicates if a zone is write locked, that is, if a write
* request targeting the zone was dispatched.
*
* Reads of this information must be protected with blk_queue_enter() /
* blk_queue_exit(). Modifying this information is only allowed while
* no requests are being processed. See also blk_mq_freeze_queue() and
* blk_mq_unfreeze_queue().
*/
unsigned int nr_zones;
unsigned int max_open_zones;
unsigned int max_active_zones;
unsigned long *conv_zones_bitmap;
unsigned long *seq_zones_wlock;
#endif /* CONFIG_BLK_DEV_ZONED */
#if IS_ENABLED(CONFIG_CDROM)
struct cdrom_device_info *cdi;
#endif
int node_id;
struct badblocks *bb;
struct lockdep_map lockdep_map;
u64 diskseq;
/*
* Independent sector access ranges. This is always NULL for
* devices that do not have multiple independent access ranges.
*/
struct blk_independent_access_ranges *ia_ranges;
};major 为磁盘设备的主设备号。
first_minor 为磁盘的第一个次设备号。
minors 为磁盘的次设备号数量,也就是磁盘的分区数量,这些分区的主设备号一样, 次设备号不同。
part_tbl 为磁盘对应的分区表,为结构体 disk_part_tbl 类型, disk_part_tbl 的核心是一个 hd_struct 结构体指针数组,此数组每一项都对应一个分区信息。
fops 为块设备操作集,为 block_device_operations 结构体类型。和字符设备操作集 file_operations 一样,是块设备驱动中的重点!
queue 为磁盘对应的请求队列,所有针对该磁盘设备的请求都放到此队列中,驱动程序需要处理此队列中的所有请求。
数据结构关系
在 Linux 内核中,块设备的管理涉及一组紧密关联的数据结构,它们共同描述了物理磁盘、分区、逻辑卷等存储实体及其操作。核心结构包括 block_device、gendisk、hd_struct和 request_queue。
1. struct block_device
代表什么?一个已打开的块设备或分区的实例。
关键作用:
* 作为文件系统挂载、open()系统调用操作的主要对象。
* 存储特定于该打开实例的信息(如挂载标志、访问模式)。
* 指向其对应的 gendisk和分区信息 (hd_struct)。
数据结构关系:
* bd_disk:指向该设备/分区所属的物理磁盘的 gendisk结构。
* bd_part:指向描述该分区的 hd_struct结构。如果是整个磁盘(如 /dev/sda),此项为 NULL。
* bd_inode:关联的 VFS inode (通常在 /dev/ 下)。
* bd_contains:如果这是一个分区,指向包含它的整个磁盘的 block_device。如果是整个磁盘,指向自己。
* bd_partno:分区号(0 表示整个磁盘)。
示例:
* /dev/sda (整个磁盘):一个 block_device,bd_part = NULL, bd_partno = 0, bd_contains 指向自己。
* /dev/sda1 (分区):一个 block_device,bd_part 指向描述 sda1 的 hd_struct, bd_partno = 1, bd_contains 指向 /dev/sda 的 block_device。
2. struct gendisk (Generic Disk)
代表什么?整个物理磁盘(或逻辑上等同于磁盘的实体,如 LVM 卷、RAID 设备)的元数据和操作接口。
关键作用:
* 内核表示一个物理存储单元的核心结构。
* 存储独立于打开实例的磁盘全局信息(容量、分区表、操作函数)。
* 管理该磁盘上的分区 (hd_struct 数组)。
数据结构关系:
* major, first_minor:设备的主、次设备号范围。
* disk_name:磁盘名称 (e.g., sda, vda)。
* part_tbl:指向 struct disk_part_tbl的指针,该结构包含一个 hd_struct 指针数组 (part),描述该磁盘上的所有分区(索引 0 通常代表整个磁盘)。
* fops:指向 struct block_device_operations,包含设备特定的操作 (open, release, ioctl, media change 等)。
* queue:指向关联的 request_queue(I/O 请求队列)。
* private_data:驱动私有数据指针。
生命周期:在驱动探测时创建 (alloc_disk),移除时销毁 (del_gendisk)。
3. struct hd_struct
代表什么?描述磁盘上的一个分区(或整个磁盘本身作为分区 0)。
关键作用:
* 存储分区静态元数据:起始扇区 (start_sect)、大小 (nr_sects)、分区号 (partno)、分区类型/标志。
* 提供分区的引用计数 (refcnt)。
数据结构关系:
* 嵌入在 gendisk->part_tbl->part[]数组中。
* 被 block_device->bd_part引用。
示例:对于 /dev/sda:
* part[0]:代表整个磁盘 /dev/sda (partno = 0, start_sect = 0, nr_sects = 磁盘总大小)。
* part[1]:代表分区 /dev/sda1 (partno = 1, start_sect = 分区起始扇区, nr_sects = 分区大小)。
* … 以此类推。
4. struct request_queue
代表什么?管理针对某个块设备(通常是 gendisk 代表的整个磁盘)的 I/O 请求队列。
关键作用:
* 接收来自文件系统、VM 等的 I/O 请求 (`struct request`)。
* 实现 I/O 调度算法 (CFQ, Deadline, NOOP, mq-deadline)。
* 包含块设备物理特性 (最大扇区大小、硬件扇区大小、对齐要求)。
* 包含队列操作函数 (请求创建、合并、派发到驱动 ->request_fn 或通过 blk-mq)。
数据结构关系:
* gendisk->queue 指向它。
* 驱动初始化时创建 (blk_init_queue 或 blk_mq_init_queue)。
总结:数据结构关系图

1. gendisk 是核心:它代表物理磁盘(或逻辑磁盘实体),包含分区表和指向请求队列的指针。一个 gendisk 对应一个物理设备。
2. block_device是访问接口:每次打开 /dev/sda, /dev/sda1 等都会创建一个 block_device 实例。它关联到对应的 gendisk 和具体的分区 (hd_struct)。
3. hd_struct 描述分区:存储在 gendisk 的part_tbl中,包含分区的物理布局信息。分区号 0 (part[0]) 代表整个磁盘。
4. request_queue 管理 I/O:与 gendisk 关联,处理针对该磁盘的所有 I/O 请求。分区设备的 I/O 最终也会路由到其所属磁盘的队列。
5. 分区 vs 设备:
* 整个设备 (e.g., /dev/sda): 一个 block_device (.bd_part = NULL, .bd_partno = 0) -> 指向一个 gendisk -> gendisk->part_tbl->part[0] 描述整个磁盘。
* 分区 (e.g., /dev/sda1):一个 block_device (.bd_part 指向 hd_struct for part1, .bd_partno = 1) -> 指向同一个 gendisk (sda) -> gendisk->part_tbl->part[1] 描述分区 1。.bd_contains 指向 /dev/sda 的 block_device。
操作函数
编写块设备驱动的时候需要分配并初始化一个 gendisk, linux 内核提供了一组 gendisk 操作函数,我们来看一下一些常用的 API 函数。
1、 申请 gendisk
使用 gendisk 之前要先申请, allo_disk 函数用于申请一个 gendisk,函数原型如下:
struct gendisk *alloc_disk(int minors)函数参数和返回值含义如下:
minors: 次设备号数量, 也就是 gendisk 对应的分区数量。
返回值: 成功:返回申请到的 gendisk,失败: NULL。
2、删除 gendisk
如果要删除 gendisk 的话可以使用函数 del_gendisk,函数原型如下:
void del_gendisk(struct gendisk *gp)函数参数和返回值含义如下:
gp: 要删除的 gendisk。
返回值: 无。
3、将 gendisk 添加到内核
使用 alloc_disk 申请到 gendisk 以后系统还不能使用,必须使用 add_disk 函数将申请到的gendisk 添加到内核中, add_disk 函数原型如下:
void add_disk(struct gendisk *disk)函数参数和返回值含义如下:
disk: 要添加到内核的 gendisk。
返回值: 无。
4、设置 gendisk 容量
每一个磁盘都有容量,所以在初始化 gendisk 的时候也需要设置其容量,使用函数set_capacity,函数原型如下:
void set_capacity(struct gendisk *disk, sector_t size)函数参数和返回值含义如下:
disk: 要设置容量的 gendisk。
size: 磁盘容量大小,注意这里是扇区数量。块设备中最小的可寻址单元是扇区,一个扇区一般是 512 字节,有些设备的物理扇区可能不是 512 字节。不管物理扇区是多少,内核和块设备驱动之间的扇区都是 512 字节。所以 set_capacity 函数设置的大小就是块设备实际容量除以512 字节得到的扇区数量。比如一个 2MB 的磁盘,其扇区数量就是(2*1024*1024)/512=4096。
返回值: 无。
5、调整 gendisk 引用计数
内核会通过 get_disk 和 put_disk 这两个函数来调整 gendisk 的引用计数,根据名字就可以知道, get_disk 是增加 gendisk 的引用计数, put_disk 是减少 gendisk 的引用计数,这两个函数原型如下所示:
struct kobject *get_disk(struct gendisk *disk)
void put_disk(struct gendisk *disk)block_device_operations 结构体和字符设备的 file _operations 一样,块设备也有操作集,为结构体 block_device_operations,此结构体定义在 include/linux/blkdev.h 中,结构体内容如下:
struct block_device_operations {
void (*submit_bio)(struct bio *bio);
int (*poll_bio)(struct bio *bio, struct io_comp_batch *iob,
unsigned int flags);
int (*open) (struct block_device *, fmode_t);
void (*release) (struct gendisk *, fmode_t);
int (*rw_page)(struct block_device *, sector_t, struct page *, enum req_op);
int (*ioctl) (struct block_device *, fmode_t, unsigned, unsigned long);
int (*compat_ioctl) (struct block_device *, fmode_t, unsigned, unsigned long);
unsigned int (*check_events) (struct gendisk *disk,
unsigned int clearing);
void (*unlock_native_capacity) (struct gendisk *);
int (*getgeo)(struct block_device *, struct hd_geometry *);
int (*set_read_only)(struct block_device *bdev, bool ro);
void (*free_disk)(struct gendisk *disk);
/* this callback is with swap_lock and sometimes page table lock held */
void (*swap_slot_free_notify) (struct block_device *, unsigned long);
int (*report_zones)(struct gendisk *, sector_t sector,
unsigned int nr_zones, report_zones_cb cb, void *data);
char *(*devnode)(struct gendisk *disk, umode_t *mode);
/* returns the length of the identifier or a negative errno: */
int (*get_unique_id)(struct gendisk *disk, u8 id[16],
enum blk_unique_id id_type);
struct module *owner;
const struct pr_ops *pr_ops;
/*
* Special callback for probing GPT entry at a given sector.
* Needed by Android devices, used by GPT scanner and MMC blk
* driver.
*/
int (*alternative_gpt_sector)(struct gendisk *disk, sector_t *sector);
};open 函数用于打开指定的块设备。
release 函数用于关闭(释放)指定的块设备。
rw_page 函数用于读写指定的页。
ioctl 函数用于块设备的 I/O 控制。
compat_ioctl 函数和 ioctl 函数一样,都是用于块设备的 I/O 控制。
getgeo 函数用于获取磁盘信息,包括磁头、柱面和扇区等信息。
owner 表示此结构体属于哪个模块,一般直接设置为 THIS_MODULE。
注册块设备
和字符设备驱动一样,我们需要向内核注册新的块设备、申请设备号,块设备注册函数为register_blkdev,函数原型如下:
int register_blkdev(unsigned int major, const char *name)函数参数和返回值含义如下:
major: 主设备号。
name: 块设备名字。
返回值: 如果参数 major 在 1~255 之间的话表示自定义主设备号,那么返回 0 表示注册成功,如果返回负值的话表示注册失败。如果 major 为 0 的话表示由系统自动分配主设备号,那么返回值就是系统分配的主设备号(1~255),如果返回负值那就表示注册失败。
注销块设备
和字符设备驱动一样,如果不使用某个块设备了,那么就需要注销掉,函数为unregister_blkdev,函数原型如下:
void unregister_blkdev(unsigned int major, const char *name)函数参数和返回值含义如下:
major: 要注销的块设备主设备号。
name: 要注销的块设备名字。
返回值: 无。
块设备 I/O 请求过程
大家如果仔细观察的话会在 block_device_operations 结构体中并没有找到 read 和 write 这样的读写函数,那么块设备是怎么从物理块设备中读写数据?这里就引出了块设备驱动中非常重要的 request_queue、 request 和 bio。
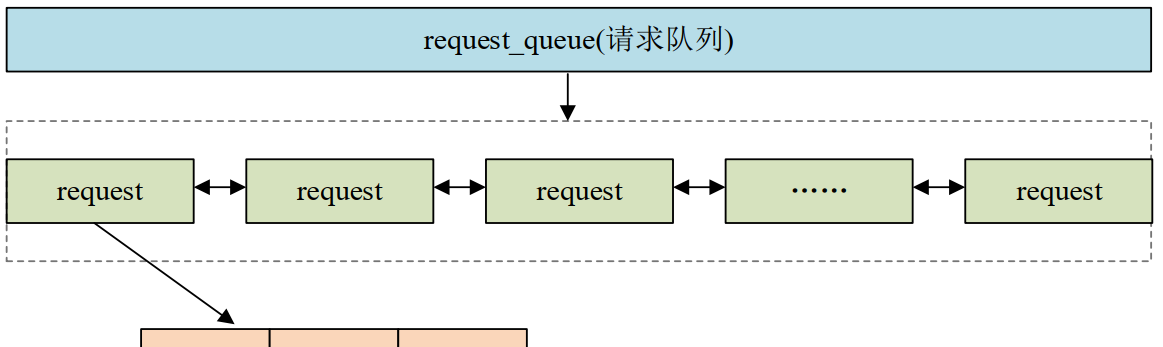
1、 请求队列 request_queue
内核将对块设备的读写都发送到请求队列 request_queue 中, request_queue 中是大量的request(请求结构体),而 request 又包含了 bio, bio 保存了读写相关数据,比如从块设备的哪个地址开始读取、读取的数据长度,读取到哪里,如果是写的话还包括要写入的数据等。我们先来看一下 request_queue,这是一个结构体,定义在文件 include/linux/blkdev.h 中:
struct request_queue {
struct request *last_merge;
struct elevator_queue *elevator;
struct percpu_ref q_usage_counter;
struct blk_queue_stats *stats;
struct rq_qos *rq_qos;
const struct blk_mq_ops *mq_ops;
/* sw queues */
struct blk_mq_ctx __percpu *queue_ctx;
unsigned int queue_depth;
/* hw dispatch queues */
struct xarray hctx_table;
unsigned int nr_hw_queues;
/*
* The queue owner gets to use this for whatever they like.
* ll_rw_blk doesn't touch it.
*/
void *queuedata;
/*
* various queue flags, see QUEUE_* below
*/
unsigned long queue_flags;
/*
* Number of contexts that have called blk_set_pm_only(). If this
* counter is above zero then only RQF_PM requests are processed.
*/
atomic_t pm_only;
/*
* ida allocated id for this queue. Used to index queues from
* ioctx.
*/
int id;
spinlock_t queue_lock;
struct gendisk *disk;
/*
* queue kobject
*/
struct kobject kobj;
/*
* mq queue kobject
*/
struct kobject *mq_kobj;
#ifdef CONFIG_BLK_DEV_INTEGRITY
struct blk_integrity integrity;
#endif /* CONFIG_BLK_DEV_INTEGRITY */
#ifdef CONFIG_PM
struct device *dev;
enum rpm_status rpm_status;
#endif
/*
* queue settings
*/
unsigned long nr_requests; /* Max # of requests */
unsigned int dma_pad_mask;
#ifdef CONFIG_BLK_INLINE_ENCRYPTION
struct blk_crypto_profile *crypto_profile;
struct kobject *crypto_kobject;
#endif
unsigned int rq_timeout;
int poll_nsec;
struct blk_stat_callback *poll_cb;
struct blk_rq_stat *poll_stat;
struct timer_list timeout;
struct work_struct timeout_work;
atomic_t nr_active_requests_shared_tags;
struct blk_mq_tags *sched_shared_tags;
struct list_head icq_list;
#ifdef CONFIG_BLK_CGROUP
DECLARE_BITMAP (blkcg_pols, BLKCG_MAX_POLS);
struct blkcg_gq *root_blkg;
struct list_head blkg_list;
#endif
struct queue_limits limits;
unsigned int required_elevator_features;
int node;
#ifdef CONFIG_BLK_DEV_IO_TRACE
struct blk_trace __rcu *blk_trace;
#endif
/*
* for flush operations
*/
struct blk_flush_queue *fq;
struct list_head requeue_list;
spinlock_t requeue_lock;
struct delayed_work requeue_work;
struct mutex sysfs_lock;
struct mutex sysfs_dir_lock;
/*
* for reusing dead hctx instance in case of updating
* nr_hw_queues
*/
struct list_head unused_hctx_list;
spinlock_t unused_hctx_lock;
int mq_freeze_depth;
#ifdef CONFIG_BLK_DEV_THROTTLING
/* Throttle data */
struct throtl_data *td;
#endif
struct rcu_head rcu_head;
wait_queue_head_t mq_freeze_wq;
/*
* Protect concurrent access to q_usage_counter by
* percpu_ref_kill() and percpu_ref_reinit().
*/
struct mutex mq_freeze_lock;
int quiesce_depth;
struct blk_mq_tag_set *tag_set;
struct list_head tag_set_list;
struct dentry *debugfs_dir;
struct dentry *sched_debugfs_dir;
struct dentry *rqos_debugfs_dir;
/*
* Serializes all debugfs metadata operations using the above dentries.
*/
struct mutex debugfs_mutex;
bool mq_sysfs_init_done;
/**
* @srcu: Sleepable RCU. Use as lock when type of the request queue
* is blocking (BLK_MQ_F_BLOCKING). Must be the last member
*/
struct srcu_struct srcu[];
};大家回过头看一下 gendisk 结构体就会发现里面有一个 request_queue 结构体指针类型成员变量 queue,也就说在编写块设备驱动的时候,每个磁盘(gendisk)都要分配一个 request_queue。
1、初始化请求队列
我们首先需要申请并初始化一个 request_queue,然后在初始化 gendisk 的时候将这个request_queue 地址赋值给 gendisk 的 queue 成员变量。使用 blk_init_queue 函数来完成request_queue 的申请与初始化,函数原型如下:
request_queue *blk_init_queue(request_fn_proc *rfn, spinlock_t *lock)函数参数和返回值含义如下:
rfn: 请求处理函数指针,每个 request_queue 都要有一个请求处理函数,请求处理函数request_fn_proc 原型如下:
void (request_fn_proc) (struct request_queue *q)请求处理函数需要驱动编写人员自行实现。
lock: 自旋锁指针,需要驱动编写人员定义一个自旋锁,然后传递进来。,请求队列会使用这个自旋锁。
返回值: 如果为 NULL 的话表示失败,成功的话就返回申请到的 request_queue 地址。
2、删除请求队列
当卸载块设备驱动的时候我们还需要删除掉前面申请到的 request_queue,删除请求队列使用函数 blk_cleanup_queue,函数原型如下:
void blk_cleanup_queue(struct request_queue *q)函数参数和返回值含义如下:
q: 需要删除的请求队列。
返回值: 无。
3、分配请求队列并绑定制造请求函数
blk_init_queue 函数完成了请求队列的申请已经请求处理函数的绑定,这个一般用于像机械硬盘这样的存储设备,需要 I/O 调度器来优化数据读写过程。但是对于 EMMC、 SD 卡这样的非机械设备,可以进行完全随机访问,所以就不需要复杂的 I/O 调度器了。对于非机械设备我们可以先申请 request_queue,然后将申请到的 request_queue 与“制造请求”函数绑定在一起。先来看一下 request_queue 申请函数 blk_alloc_queue,函数原型如下:
struct request_queue *blk_alloc_queue(gfp_t gfp_mask)函数参数和返回值含义如下:
gfp_mask: 内存分配掩码,具体可选择的掩码值请参考 include/linux/gfp.h 中的相关宏定义,一般为 GFP_KERNEL。
返回值: 申请到的无 I/O 调度的 request_queue。
我们需要为 blk_alloc_queue 函数申请到的请求队列绑定一个“制造请求”函数。这里我们需要用到函数 blk_queue_make_request,函数原型如下:
void blk_queue_make_request(struct request_queue *q, make_request_fn *mfn)函数参数和返回值含义如下:
q: 需要绑定的请求队列,也就是 blk_alloc_queue 申请到的请求队列。
mfn:需要绑定的“制造”请求函数,函数原型如下:
void (make_request_fn) (struct request_queue *q, struct bio *bio)“制造请求”函数需要驱动编写人员实现。
返回值: 无。
一般 blk_alloc_queue 和 blk_queue_make_request 是搭配在一起使用的,用于非机械的存储设备、无需 I/O 调度器,比如 EMMC、 SD 卡等。 blk_init_queue 函数会给请求队列分配一个 I/O 调度器,用于机械存储设备,比如机械硬盘等。
请求 request
请求队列(request_queue)里面包含的就是一系列的请求(request), request 里面有一个名为“bio”的成员变量,类型为 bio 结构体指针。前面说了,真正的数据就保存在 bio 里面,所以我们需要从 request_queue 中取出一个一个的 request,然后再从每个 request 里面取出 bio,最后根据 bio 的描述讲数据写入到块设备,或者从块设备中读取数据。
1、 获取请求
我们需要从request_queue中依次获取每个request,使用blk_peek_request函数完成此操作,函数原型如下:
request *blk_peek_request(struct request_queue *q)函数参数和返回值含义如下:
q: 指定 request_queue。
返回值: request_queue 中下一个要处理的请求(request),如果没有要处理的请求就返回NULL。
2、开启请求
使用 blk_peek_request 函数获取到下一个要处理的请求以后就要开始处理这个请求,这里要用到 blk_start_request 函数,函数原型如下:
void blk_start_request(struct request *req)函数参数和返回值含义如下:
req: 要开始处理的请求。
返回值: 无。
③、一步到位处理请求
我们也可以使用 blk_fetch_request 函数来一次性完成请求的获取和开启, blk_fetch_request函数很简单,内容如下:
struct request *blk_fetch_request(struct request_queue *q)
{
struct request *rq;
rq = blk_peek_request(q);
if (rq)
blk_start_request(rq);
return rq;
}可以看出, blk_fetch_request 就是直接调用了 blk_peek_request 和 blk_start_request 这两个函数。
4、其他和请求有关的函数
关于请求的 API 还有很多:
| 函数 | 描述 |
| blk_end_request() | 请求中指定字节数据被处理完成。 |
| blk_end_request_all() | 请求中所有数据全部处理完成。 |
| blk_end_request_cur() | 当前请求中的 chunk。 |
| blk_end_request_err() | 处理完请求,直到下一个错误产生。 |
| __blk_end_request() | 和 blk_end_request 函数一样,但是需要持有队列锁。 |
| __blk_end_request_all() | 和 blk_end_request_all 函数一样,但是需要持有队列锁。 |
| __blk_end_request_cur() | 和 blk_end_request_cur 函数一样,但是需要持有队列锁。 |
| __blk_end_request_err() | 和 blk_end_request_err 函数一样,但是需要持有队列锁。 |
bio 结构
每个 request 里面里面会有多个 bio, bio 保存着最终要读写的数据、地址等信息。上层应用程序对于块设备的读写会被构造成一个或多个 bio 结构, bio 结构描述了要读写的起始扇区、要读写的扇区数量、是读取还是写入、页偏移、数据长度等等信息。上层会将 bio 提交给 I/O 调度器, I/O 调度器会将这些 bio 构造成 request 结构,而一个物理存储设备对应一个 request_queue,request_queue 里面顺序存放着一系列的 request。新产生的 bio 可能被合并到 request_queue 里现有的 request 中,也可能产生新的 request,然后插入到 request_queue 中合适的位置,这一切都
是由 I/O 调度器来完成的。 request_queue、 request 和 bio 之间的关系如图所示:
bio 是个结构体,定义在 include/linux/blk_types.h 中,结构体内容如下:
struct bio {
struct bio *bi_next; /* request queue link */
struct block_device *bi_bdev;
blk_opf_t bi_opf; /* bottom bits REQ_OP, top bits
* req_flags.
*/
unsigned short bi_flags; /* BIO_* below */
unsigned short bi_ioprio;
blk_status_t bi_status;
atomic_t __bi_remaining;
struct bvec_iter bi_iter;
blk_qc_t bi_cookie;
bio_end_io_t *bi_end_io;
void *bi_private;
#ifdef CONFIG_BLK_CGROUP
/*
* Represents the association of the css and request_queue for the bio.
* If a bio goes direct to device, it will not have a blkg as it will
* not have a request_queue associated with it. The reference is put
* on release of the bio.
*/
struct blkcg_gq *bi_blkg;
struct bio_issue bi_issue;
#ifdef CONFIG_BLK_CGROUP_IOCOST
u64 bi_iocost_cost;
#endif
#endif
#ifdef CONFIG_BLK_INLINE_ENCRYPTION
struct bio_crypt_ctx *bi_crypt_context;
#endif
union {
#if defined(CONFIG_BLK_DEV_INTEGRITY)
struct bio_integrity_payload *bi_integrity; /* data integrity */
#endif
};
unsigned short bi_vcnt; /* how many bio_vec's */
/*
* Everything starting with bi_max_vecs will be preserved by bio_reset()
*/
unsigned short bi_max_vecs; /* max bvl_vecs we can hold */
atomic_t __bi_cnt; /* pin count */
struct bio_vec *bi_io_vec; /* the actual vec list */
struct bio_set *bi_pool;
/*
* We can inline a number of vecs at the end of the bio, to avoid
* double allocations for a small number of bio_vecs. This member
* MUST obviously be kept at the very end of the bio.
*/
struct bio_vec bi_inline_vecs[];
};bvec_iter 结构体类型的成员变量,bio_vec 结构体指针类型的成员变量。
bvec_iter 结构体描述了要操作的设备扇区等信息,结构体内容如下:
struct bvec_iter {
sector_t bi_sector; /* I/O 请求的设备起始扇区(512 字节) */
unsigned int bi_size; /* 剩余的 I/O 数量 */
unsigned int bi_idx; /* blv_vec 中当前索引 */
unsigned int bi_bvec_done; /* 当前 bvec 中已经处理完成的字节数 */
};bio_vec 结构体描述了内容如下:
struct bio_vec {
struct page *bv_page; /* 页 */
unsigned int bv_len; /* 长度 */
unsigned int bv_offset; /* 偏移 */
};可以看出 bio_vec 就是“page,offset,len”组合, page 指定了所在的物理页, offset 表示所处页的偏移地址, len 就是数据长度。
我们对于物理存储设备的操作不外乎就是将 RAM 中的数据写入到物理存储设备中,或者将物理设备中的数据读取到 RAM 中去处理。数据传输三个要求:数据源、数据长度以及数据目的地,也就是你要从物理存储设备的哪个地址开始读取、读取到 RAM 中的哪个地址处、读取的数据长度是多少。既然 bio 是块设备最小的数据传输单元,那么 bio 就有必要描述清楚这些信息,其中 bi_iter 这个结构体成员变量就用于描述物理存储设备地址信息,比如要操作的扇区地址。 bi_io_vec 指向 bio_vec 数组首地址, bio_vec 数组就是 RAM 信息,比如页地址、页偏移以及长度,“页地址”是 linux 内核里面内存管理相关的概念,这里我们不深究 linux 内存管理,我们只需要知道对于 RAM 的操作最终会转换为页相关操作。bio、 bvec_iter 以及 bio_vec 这三个机构体之间的关系如图所示:
![图片[1] - S5P6818_驱动篇(25)块设备驱动 - 宋马](https://pic.songma.com/blogimg/20250612/c66772ca1f7640429581bad4da92f9e8.png)
1、遍历请求中的 bio
前面说了,请求中包含有大量的 bio,因此就涉及到遍历请求中所有 bio 并进行处理。遍历请求中的 bio 使用函数__rq_for_each_bio,这是一个宏,内容如下:
#define __rq_for_each_bio(_bio, rq)
if ((rq->bio))
for (_bio = (rq)->bio; _bio; _bio = _bio->bi_next)_bio 就是遍历出来的每个 bio, rq 是要进行遍历操作的请求, _bio 参数为 bio 结构体指针类型, rq 参数为 request 结构体指针类型。
2、遍历 bio 中的所有段
bio 包含了最终要操作的数据,因此还需要遍历 bio 中的所有段,这里要用到bio_for_each_segment 函数,此函数也是一个宏,内容如下:
#define bio_for_each_segment(bvl, bio, iter)
__bio_for_each_segment(bvl, bio, iter, (bio)->bi_iter)第一个 bvl 参数就是遍历出来的每个 bio_vec,第二个 bio 参数就是要遍历的 bio,类型为bio 结构体指针,第三个 iter 参数保存要遍历的 bio 中 bi_iter 成员变量。
3、通知 bio 处理结束
如果使用“制造请求”,也就是抛开 I/O 调度器直接处理 bio 的话,在 bio 处理完成以后要通过内核 bio 处理完成,使用 bio_endio 函数,函数原型如下:
bvoid bio_endio(struct bio *bio, int error)函数参数和返回值含义如下:
bio: 要结束的 bio。
error: 如果 bio 处理成功的话就直接填 0,如果失败的话就填个负值,比如-EIO。
返回值: 无


















暂无评论内容