
控制卡总线
Motion
的安装与使用方法
雷赛公司除了开发了驱动程序、函数库以外,还开发了一套控制卡总线
Motion
。
用户在使用
VB
、
VC
或其它高级语言编写应用程序之前,可利用控制卡总线
Motion
软件
快速熟悉
DMC-E
系列总线运动控制卡的硬件、软件功能,还可以方便快捷地测试电机、传感
器、开关元件、平台等在执行各种动作时的性能特点。
此外,在编程控制之前,需用总线
Motion
扫描从站并进行总线配置。
5.1
控制卡总线
Motion
的安装步骤
安装控制卡总线
Motion
测试软件的步骤如下:
1
)使用控制卡总线
Motion
前,请确保已经通读本手册,并参照第
4
章硬件及驱动程序的
安装,完成硬件设置、硬件安装和驱动程序安装。
2
)启动
PC
机,进入
Windows
操作系统。
3
)将
DMC-E
系列总线运动控制卡资料包中的
“MOTION
控制卡总线
Motion”
,全部复制
到硬盘中。
4
)在复制到硬盘中的控制卡总线
Motion
目录中找到
Leadshine.DMC.IDE.exe
,双击运行,
即显示如图
5.1
所示的演示软件主界面。在此界面上可以通过点击相应按钮,进入各功能界面。
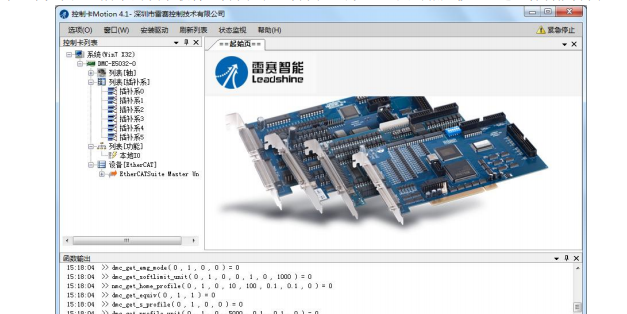
图
5.1 演示软件主界面雷赛控制
EtherCAT
总线卡用户使用手册
V2.0
5
)选择所需的卡,然后进行相应的操作。
6
)至此,即可使用控制卡总线
Motion
软件进行测试。
注意:
本软件是基于
.NET 4.0
开发,请在使用软件前确保操作系统内已经安装了
.NET 4.0
,若
未安装请先安装。
5.2 Motion
软件的功能与使用方法
当使用
DMC-E
系列总线运动控制卡时,控制卡总线
Motion
提供了参数设置、
IO
检测、
运动测试、帮助这四个主要的操作界面。设置好界面上的参数后,就可以进行一些基本的控制
操作,如:点位运动、直线插补、圆弧插补、
I/O
信号检测等。
控制卡
Motion
软件主要用于设备扫描配置以及功能测试使用,界面简单,操作方便。
软件主界面主要分为
5
个部分:
(
1
)菜单栏,用于
Motion
软件的设置、驱动安装、刷新列表和紧急停止。
(
2
)控制卡列表窗口,控制卡列表区的控制卡列表是在软件启动时先扫描
PC
系统上已经
插入的控制卡并显示在列表上。轴列表会显示控制卡上已经连接的轴,插补系列表和功能列表
根据控制卡的不同而有所不同,设备列表会显示已经加入
EtherCAT
网络的设备。
(
3
)功能页面窗口。
(
4
)信息输出窗口,支持所有函数调用过程的信息输出。
(
5
)状态栏,显示总线的状态,会根据控制卡列表区选择的控制卡类型不同而有所不同。
主界面如下图:
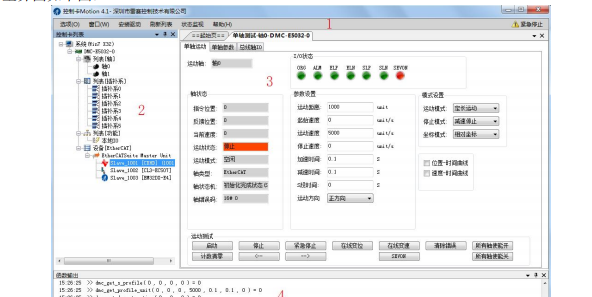
图
5.2
主界面
各功能详细使用方法见控制卡
Motion
使用手册。
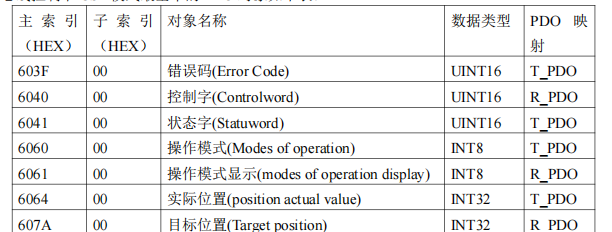
5.2.1 EtherCAT
总线配置
DMC-E
系列总线运动控制卡在使用前必须配置总线参数,下载总线轴
PDO
配置和轴
IO
映射。不同的
PDO
对象组合,可以实现不同的功能,
PDO
常用对象可参见附录
3
,
EtherCAT
总线控制卡
CSP
模式最基本的
PDO
对象如下表:
从站
PDO
对象的删减可以通过
motion
操作,但需根据从站实际需要的
PDO
对象合理的
增减,下面介绍
EtherCAT
总线控制卡连接从站的操作方法。
在控制卡列表区,点击
“
设备【
EtherCat
】
”
按钮进入总线配置界面。总线参数可以手动配
置也可以自动配置,一般自动配置总线即可。扫描完成后可以手动修改
PDO
对象。
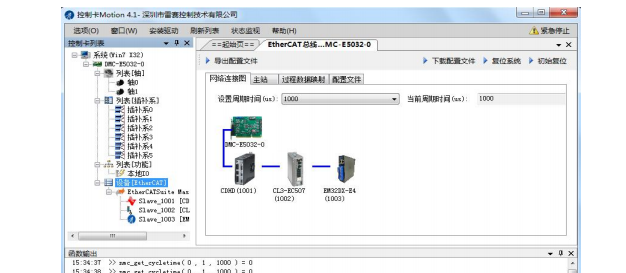
图 5.3 总线配
置界面
1)
自动配置总线
总线配置可以通过扫描来自动匹配完成总线结构配置,在扫描前需要把总线上的从站设备
都接好并上电,然后右键点击主站
“EtherCATSuite Master Unit”
,选择
“
扫描设备
”
进行扫描。

图
5.4
扫描设备菜单
当扫描完成后,主站节点下会显示总线上所有的从站。

图
5.5
从站列表
2)
手动配置总线
在主站右键菜单选择
“
添加从站
”
或
“
插入从站
”
菜单项可以添加或插入从站到该主站下。
在从站右键菜单选择
“
插入从站
”“
移除从站
”
可以在当前位置插入从站设备或移除当前选
择的从站设备。
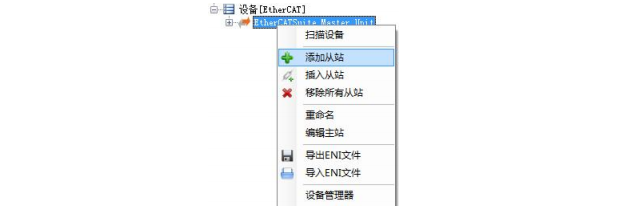
图
5.6
从站操作菜单
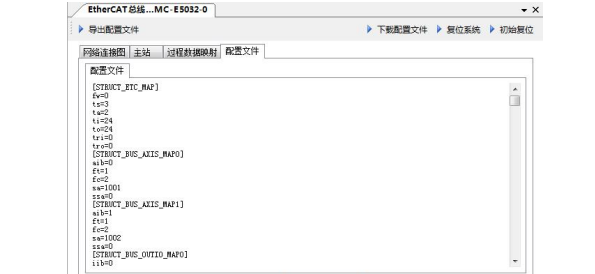
3)
配置从站
PDO
参数
设备厂商提供的设备描述文件中已经有默认的
PDO
配置,但实际应用过程如果需要用到
额外的参数,就需要对
PDO
配置进行修改和配置。若用户需要修改从站
PDO
参数,可以双击
列表中的从站名称,即可显示从站相关配置项,修改从站过程数据的
PDO
对象。在配置完相
关参数后,需将配置文件下载到控制卡中。
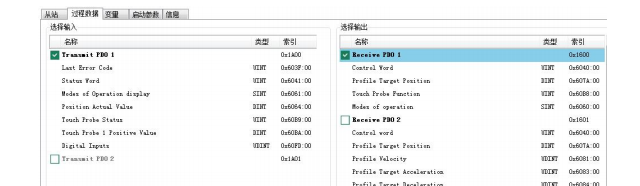
图
5.7
从站参数
4)
配置主站参数
双击选择主站名称,即可显示主站参数项。
图
5.8
主站编辑
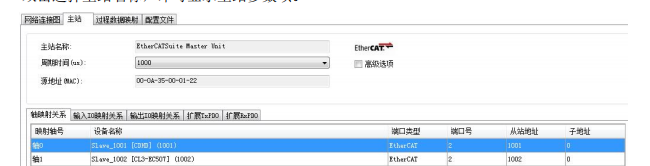
5)
配置映射
轴映射指的是建立
EtherCAT
驱动器
(EtherCAT
地址
)
和
EtherCAT
总线控制卡中的轴号的
对应关系。映射控制卡的轴号到从站的轴和控制卡的
IO
索引到从站的
IO
索引,映射完成后就
可以像操作本地轴和本地
IO
一样操作从站的功能。
默认扫描完成或添加从站时映射关系软件已经自动配置完成,注意:控制卡的本地轴和本
地
IO
默认被映射到最前面。
图
5.9
映射配置
注意:对于
Motion
没有自动映射轴号的驱动器设备
(
设备描述文件没有集成到
EtherCAT
总
线控制卡
Motion
软件中
)
,用户需要手动添加该驱动器和轴号的映射关系。
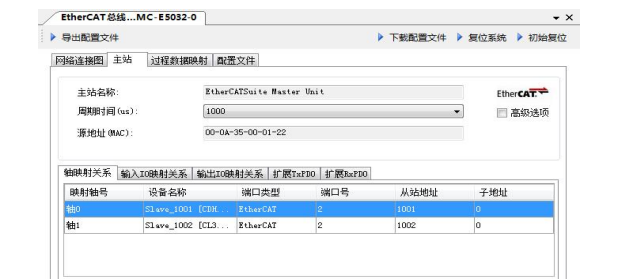
6)
配置下载
在配置完成从站和主站以及映射关系后,需要把配置文件下载到控制卡。
点击
“
下载文件
”
完成配置文件下载,若软件未自动复位控制卡,需要手动点击
“
复位系统
”
来复位重启控制卡。至此,
EtherCAT
总线配置完成,可以像操作脉冲卡一样操作了。
图
5.10
下载配置文件
7
)总线状态
在主界面右下角状态栏显示总线状态,若出现错误将显示总线错误码,点击该错误码,会
弹出错误的具体意义对话框。

图
5.11
总线状态
注意
:总线错误码说明见附录
2
。
5.2.2
辅助功能
5.2.2.1
重启
当使用控制卡出现异常情况时,可以通过复位来实现控制卡重启。右键选择对应的控制卡,
即可出现复位控制卡的菜单项。
复位分为两种:冷复位和热复位。
冷复位:重启控制卡操作系统,控制卡内部所有程序重启,复位速度较慢;
热复位:重启控制卡应用程序,重新连接从站,复位速度较快。
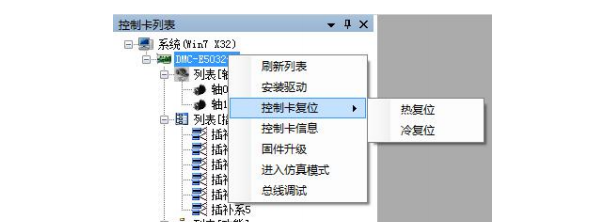
图
5.12
复位控制卡菜单
注意
:系统中增加或减少从站后都要执行重新扫描配置主从站并下载。
5.2.2.2
控制卡信息
当需要了解控制卡相关信息时,可右键点击对应的控制卡,选择
“
控制卡信息
”
菜单项。
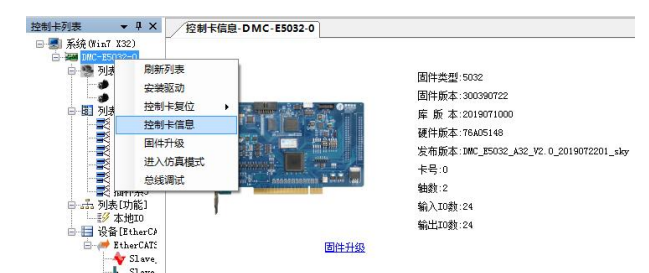
图
5.13
控制卡信息菜单
5.2.2.3
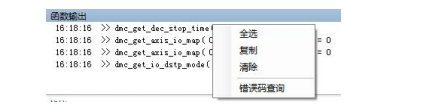
信息输出
控制卡
Motion
软件支持所有函数调用过程的信息输出,在菜单栏
“
窗口
”
选择
“
函数输出窗
口
”
即可显示输出窗口。
函数输出窗口中输出了函数的调用名称、参数以及返回值,当返回值为错误码时会以红色
标记。
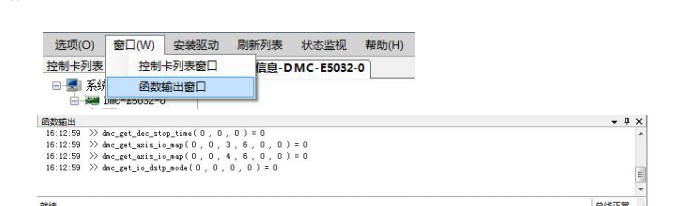
图
5.14
函数输出窗口
5.2.2.4
错误码查询
在函数输出窗口右击,选择
“
错误码查询
”
菜单项,即可弹出错误码查询窗口,输入错误码,
点击
“
查询
”
即可显示错误码对应的信息。
错误码查询菜单
图
5.15
错误码查询窗口
5.2.3
参数配置
当使用控制卡前,需要对控制卡的轴运动、
IO
信号以及伺服信号等相关参数进行合理配置。
注意:不同型号控制卡,请根据现场情况以及产品使用手册进行合理配置。
选择
“
控制卡列表区
”
的控制卡
->
展开
“
列表
[
轴
] ”
列表
->
选择要操作的轴
->
双击
“
轴
0”
按钮
->
单击
“
单轴参数
”
选项页,进入轴参数配置窗口。
在进入参数配置窗口后,可以通过点击
“
上传
”
按钮上传控制卡内的参数到当前窗口显示,
点击
“
下载
”
按钮把当前界面的参数下载到控制卡;当所有轴参数设置相同时,点击
“
应用到所
有轴
”
按钮可以把当前轴设置的参数应用到所有轴。窗口打开时默认会上传控制内最新的参数。
注意:不同类型控制卡参数项可能有所不同

图
5.16
参数配置窗口
5.2.3.1
轴参数
1)
基本设置
设置各个轴的基本运动参数,包括脉冲当量、初始速度、定位速度、终止速度、加减速时
间、
S
段时间等参数。
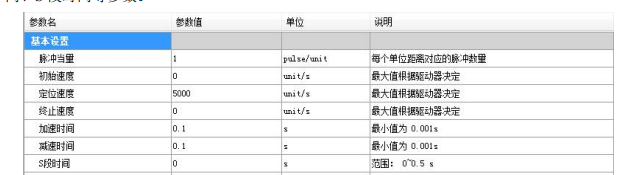
图
5.17
基本参数设置
脉冲当量:根据控制卡所接电机的轴的参数设置对应的当量参数,当量为一个运动单位所
需要的运动数量,单位为
pulse/unit
。
初始速度:设置单轴运动时,轴运动开始的起步速度,单位为
unit/s
。
定位速度:设置单轴运动时,轴运动的最大速度,单位为
unit/s
。
终止速度:设置单轴运动时,轴运动结束时的停止速度,单位为
unit/s
。
加速时间:设置单轴运动时,轴运动由初始速度加速到最大速度时所需要的时间,单位为
s
。
减速时间:设置单轴运动时,轴运动快结束时由最大速度降速到终止速度时所需要的时间,
单位为
s
。
S
段时间:设置单轴运动时,轴
s
型曲线速度的时间,单位为
s
。
减速停止时间:设置单轴运动时,调用减速停止指令或遇到异常信号减速后,减速停止的
时间,单位
s
。
2)
回零设置
设置各个轴的回零参数,回零参数包括回零低速、回零高速、加减速度时间、回零模式。

图
5.18
回零参数设置
回零低速:回零时低速运动时的速度。
回零高速:回零时高速运动时的速度。
加速时间:回零时由低速到高速的加速段时间。
减速时间:回零时由高速到低速的减速段时间。
回零模式:设置回零的回零方式。
3)
软限位设置
设置各个轴的软限位参数,参数包括:软限位启用、软限位正、软限位负、停止模式、编
码器启用等。

图
5.19
软限位参数设置
限位启用:设置软限位是否启用。
软限位正:设置软限位正方向位置,轴运动的最大范围。
软限位负:设置软限位负方向位置,轴运动的最小范围。
停止模式:设置轴触发软限位后,停止的模式。
编码器启用:位置是否是检测编码器反馈位置。
4)
急停设置
设置急停参数设置,参数包括:急停启用、有效电平、急停
IO
映射等。

图
5.20
急停设置
急停启用:设置急停是否启用。
有效电平:设置急停
IO
信号触发的有效电平。
急停
IO
映射:设置急停
IO
信号映射到其他
IO
上。
5)
减速停止设置
设置减速停止参数,参数包括:信号启用、有效电平、减速停止
IO
映射等。

图
5.21
减速停止设置
信号启用:设置是否启用减速停止信号。
有效电平:设置减速停止信号触发电平。
减速停止
IO
映射:设置减速停止
IO
信号映射到其他
IO
信号上。
5.2.3.2
插补参数
选择
“
控制卡列表
”
区的控制卡
->
展开
“
列表
[
插补系
] ”
列表
->
选择要操作的插补坐标系
->
双
击
“
插补系
0”
按钮
->
单击
“
插补系参数
”
选项页,进入插补系参数配置窗口。
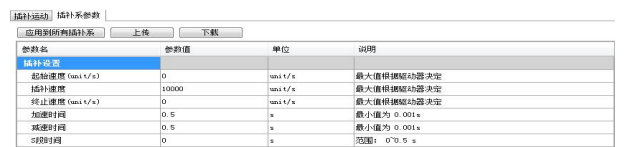
图
5.22
插补参数
注意:插补参数中所有的速度都是坐标系内的各个轴的合成速度。
起始速度:设置插补运动的起始速度。
插补速度:设置插补运动的最大速度。
终止速度:设置插补运动的停止速度。
加速时间:设置插补运动由起始速度到最大速度的加速时间。
减速时间:设置插补运动由最大速度到停止速度的减速时间。
S
段时间:设置插补运动
s
型速度曲线的时间。
5.2.4
功能测试
测试控制卡各项功能,包括单轴测试、多轴测试、手轮测试、
PVT
测试、单轴比较、二
维比较、原点锁存、高速锁存、连续插补、
PWM
测试、
AD
测试、
DA
测试等。注意:不同类
型的控制卡可能测试项不同。
5.2.4.1
单轴测试
测试各个轴的定长、定速以及回零运动,支持在线变速和在线变位运动,监视各个轴的运
动状态以及轴状态信息。

图
5.23
单轴测试界面
一般操作步骤:
1.
设置模式,设置好运动模式及其他参数,注意:不同运动模式参数项不一样。
2.
设置参数。
3.
设置曲线显示,勾选需要采集的曲线进行曲线显示。
4.
点击
“
启动
”
按钮,即开始运动。
1)
模式设置
运动模式:选择测试运动的模式,包括定长运动、连续运动以及回零运动。
停止模式:设置点击
“
停止
”
按钮时,停止是减速停止还是立即停止。
位置类型:设置参数项中的目标位置是绝对定位还是相对定位。
2)
参数项
运动轴选择:勾选需要参数运动的轴。
起始速度:定位运动起始的速度。
最大速度:定位运动达到的最大运动速度。
终止速度:定位运动结束运动时的速度。
加速时间:定位运动从起始速度到最大速度的加速段时间。
减速时间:定位运动从最大速度到停止速度的减速段时间。
S
段时间:
S
曲线速度段的时间。
目标位置:设置定位运动的运动到的目标位置,若位置坐标类型设置为
“
相对坐标
”
则该值
为相对于当前位置的相对距离。
运动方向:设置
“
相对坐标
”
模式下,相对定位方向。
回零低速:回零运动低速时的速度。
回零高速:回零运动高速时的速度。
回零方向:回零运动的方向,正方向
/
负方向。
回零模式:设置回零的模式,具体模式请参照对应型号的控制卡手册。
回零速度模式:设置回零时低速回零还是高速回零。
3)
图形显示
位置
–
时间曲线:采集显示位置与时间关系曲线。
速度
–
时间曲线:采集显示速度与时间关系曲线。
4)
操作
启动:启动选择的轴运动。
单轴停止:停止选择的轴。
紧急停止:紧急停止所有的轴运动。
计数器清零:设置所有轴指令位置和反馈位置为
0
。
在线变速:在轴定位运动时改变选择的轴的运动速度。
在线变位:在轴定位运动时改变选择轴的定位目标位置。
SEVON
:使能
/
失能轴。
5.2.4.2
多轴测试
测试多轴插补运动,包括直线插补、各类型圆弧
/
螺旋线插补等。
选择
“
控制卡列表
”
区的控制卡
->
展开
“
列表
[
插补系
]”
列表
->
选择要操作的插补坐标系
->
双
击
“
插补系
0”
按钮
->
单击
“
插补运动
”
选项页,进入插补运动操作窗口。
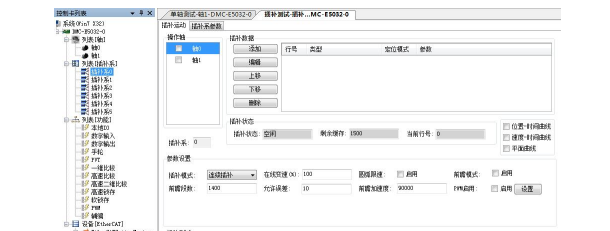
图
5.24
多轴测试界面
一般操作步骤
1.
使能参与运动的轴,点击
“SEVON”
使能操作的轴。
2.
选择操作轴,选择需要参与插补运动的轴号。
3.
设置插补模式。
4.
添加插补数据
5.
轴参数设置,设置多轴插补速度参数或者连续插补速度参数。
6.
图形显示,勾选需要显示的曲线。
7.
点击
“
启动
”
按钮,启动运动。
1)
插补模式
设置插补运动是连续插补或者多段插补。选择连续插补后,下方会出现连续插补设置项
在线变速(
%
):设置在线变速的百分比
圆弧限速:设置是否启用圆弧限速功能
前瞻模式:设置是否启用前瞻模式
前瞻段数:设置前瞻模式的段数
允许误差:设置开启前瞻模式时的允许误差范围
前瞻加速度:设置前瞻模式的前瞻加速度
PWM
启用: 设置是否启用连续插补运动中的
PWM
跟随功能。点击设置,可以进入
PWM
跟随功能参数设置窗口。
2
)添加插补数据操作过程
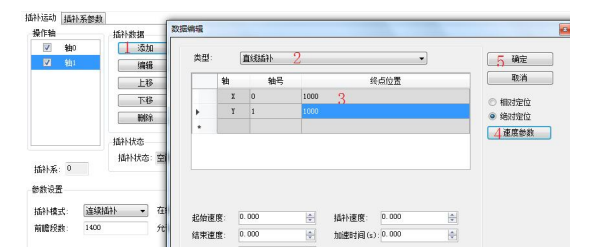
图
5.25
添加插补数据界面
5.2.4.3
手轮测试
测试手轮运动。在控制卡列表区选择控制卡
->
展开
“
列表
[
功能
]”
列表
->
双击
“
手轮
”
按钮,
进入手轮测试窗口。注意:不同的控制卡,手轮配置选项可能不同
操作步骤
1
)手轮配置,配置手轮通道、手轮输入模式等。
2
)选择手轮控制轴号以及手轮倍率。
3
)启动手轮运动。
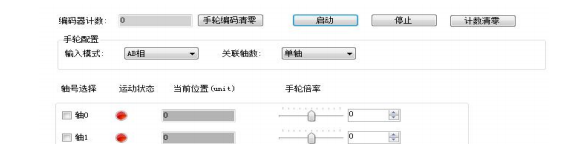
图
5.26
手轮测试界面
5.2.4.4
单轴比较
测试单轴比较。在控制卡列表去选择控制卡
->
展开
“
列表
[
功能
]”
列表
->
双击
“
一维比较
”
按钮,
进入一维比较测试窗口。
图
5.27
单轴比较测试界面
一般操作步骤
1
)添加数据表。
2
)选择测试轴,设置轴速度相关参数。
3
)启动运动。
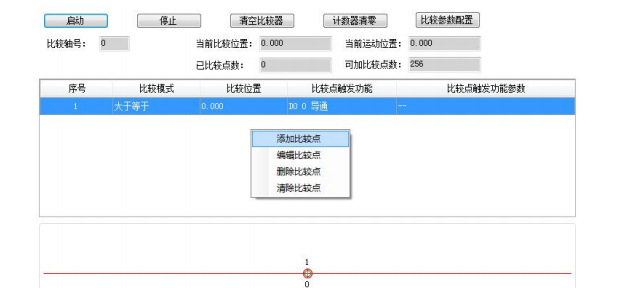
比较数据编辑
1
)添加数据,右键菜单选择
“
添加比较点
”
菜单项,在编辑窗口中添加数据,确定即可。
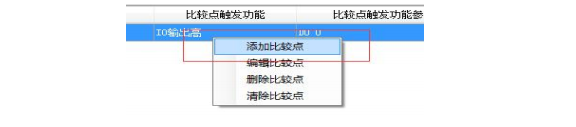
图
5.28
添加比较点菜单
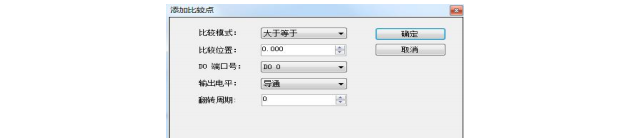
图
5.29
比较点编辑窗口
2
)编辑比较点,右键菜单选择
“
编辑比较点
”
菜单项或双击需要编辑的行,再在编辑窗口
编辑数据确定即可。
3)
删除比较点,右键菜单选择
“
删除比较点
”
菜单项,即可删除选择的比较点数据。
4)
清除比较点,右键菜单选择
“
清除比较点
”
菜单项,即可清除所有的比较点数据。
比较状态监视
实时显示比较器的当前比较位置、已比较点数和可加比较点数,同时实时显示比较数据图。

图
5.30
比较状态
5.2.4.5
高速锁存
测试高速锁存。在控制卡列表中选择控制卡
->
展开
“
列表
[
功能
]”
列表
->
双击
“
高速锁存
”
按钮,
进入高速锁存窗口。
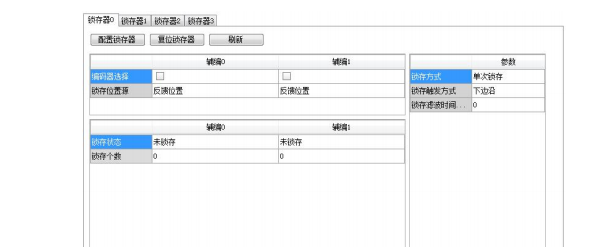
图
5.31
高速锁存窗口
一般操作步骤:
1
)复位锁存器。
2
)锁存参数配置。
3
)配置锁存器。
4
)启动运动,
LTC
被触发时,读取锁存值,并在锁存区显示。
全职写分享不易,如果您觉得我的文章对您有帮助的话;强烈建议您打赏一元,我买瓶水喝;您的支持将是我继续写分享路上的无限动力,谢谢!






















暂无评论内容