
目录
这是官方的原版eMPL文件
inv_mpu.c修改
1、增加定义和声明
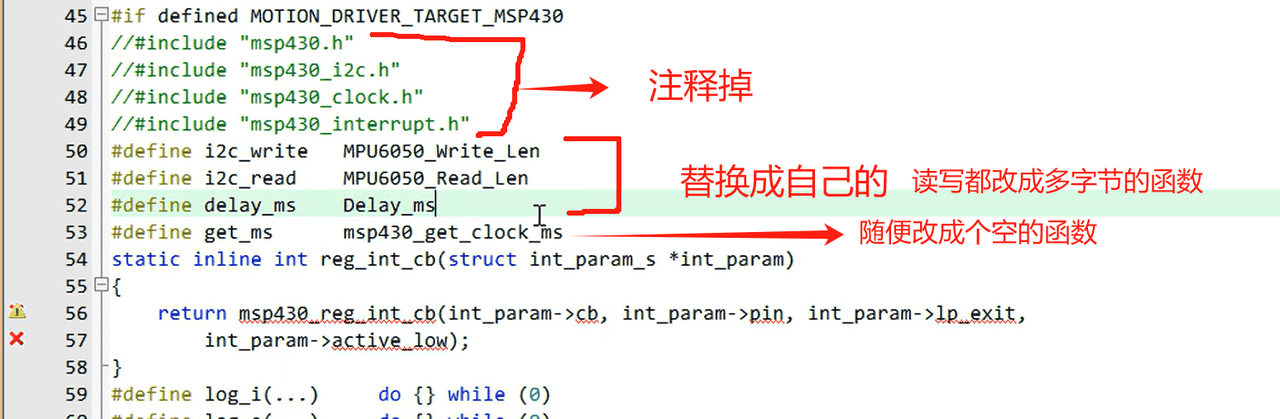
2、注释和函数接口修改
3、注释
4、printf 换成自己的打印输出函数即可
5、初始化函数修改 去掉形参
inv_mpu.h 修改
1、从inv_mpu.c复制定义过来
inv_mpu_dmp_motion_driver.c 和.h 修改
1、增加
2、注释和替换
3、增加函数
4、把后两个函数加在头文件中
修改MPU6050.c
1、加头文件
2、增加宏定义和部分变量
3、增加连续地址写
4、增加连续地址读
5、增加 MPU6050_DMPInit()初始化函数
6、MPU6050_ReadDMP
编译后的报错解决
1、注释
2、删除 static
编辑
3、如果出现这个关于报错,
定时器的配置,一般20Hz就可以,根据自己的需求调整吧
主函数及相关变量的定义
效果:
F130C8T6工程源码
这是官方的原版eMPL文件
通过网盘分享的文件:eMPL
链接: https://pan.baidu.com/s/1BpWmEqj30FbpkVhOWylSrA?pwd=jvif 提取码: jvif
–来自百度网盘超级会员v5的分享
inv_mpu.c修改
1、增加定义和声明
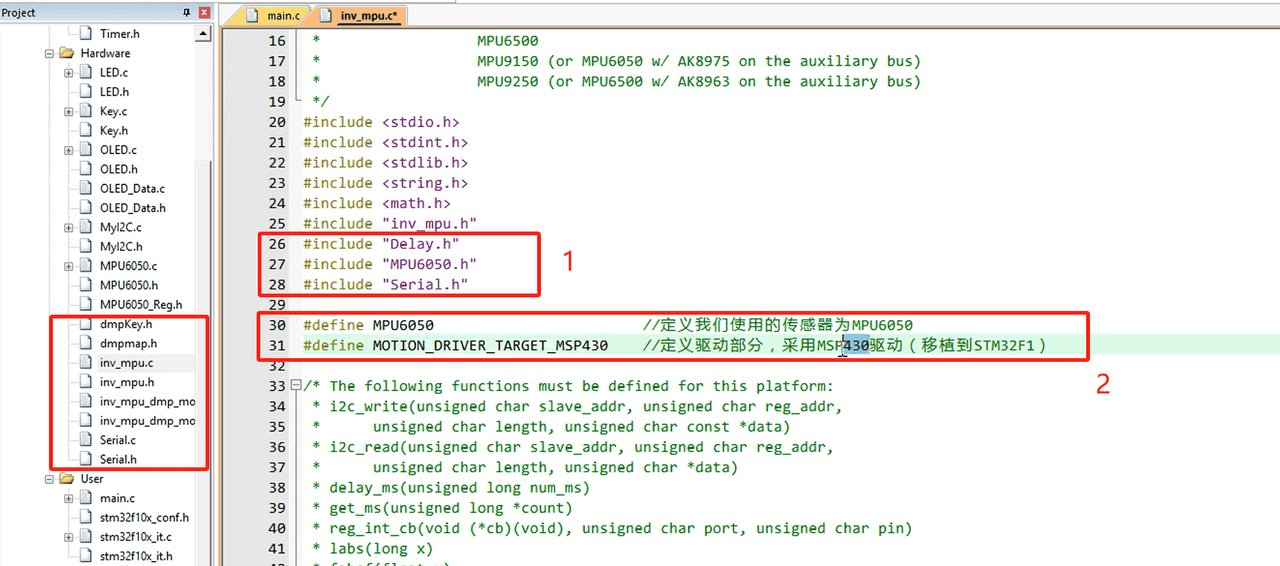
#include "MPU6050.h"
#include "Delay.h"
#include "Serial.h" // 替换成自己的有串口的文件
#define MPU6050 //定义我们使用的传感器为MPU6050
#define MOTION_DRIVER_TARGET_MSP430 //定义驱动部分,采用MSP430驱动(移植到STM32F1)2、注释和函数接口修改

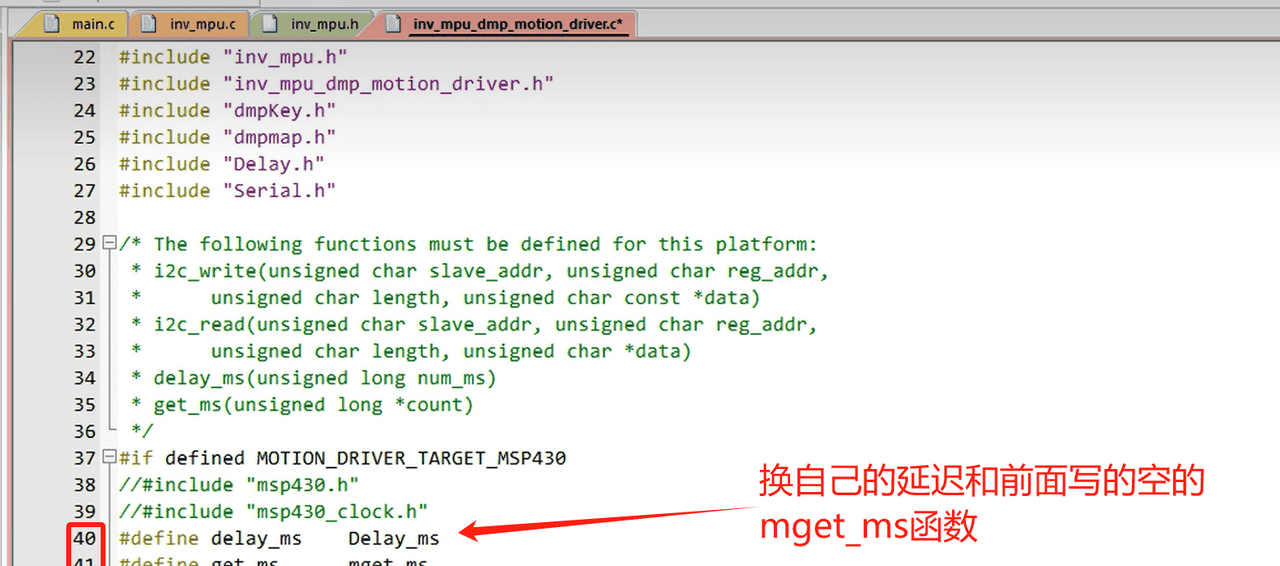
新写的mget_ms函数放在.c文件后面,并在.h头文件中声明
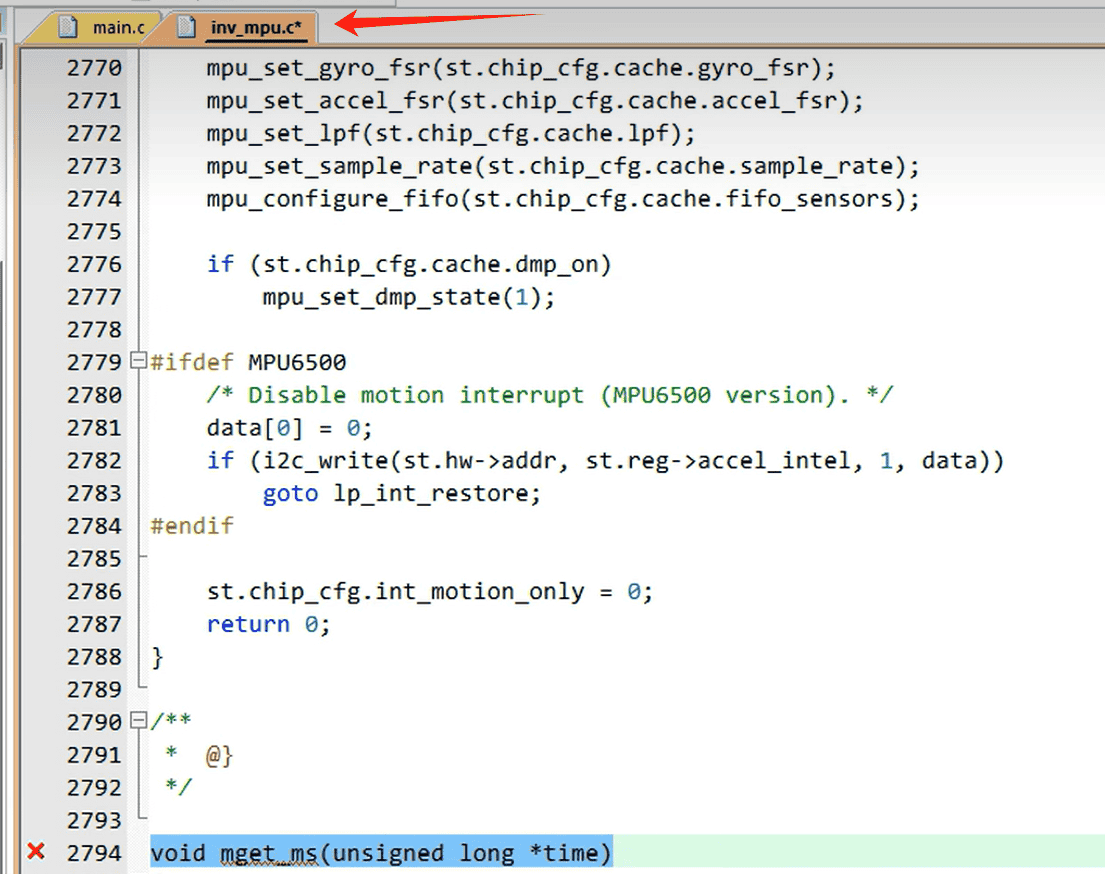
void mget_ms(unsigned long *time)
{
}
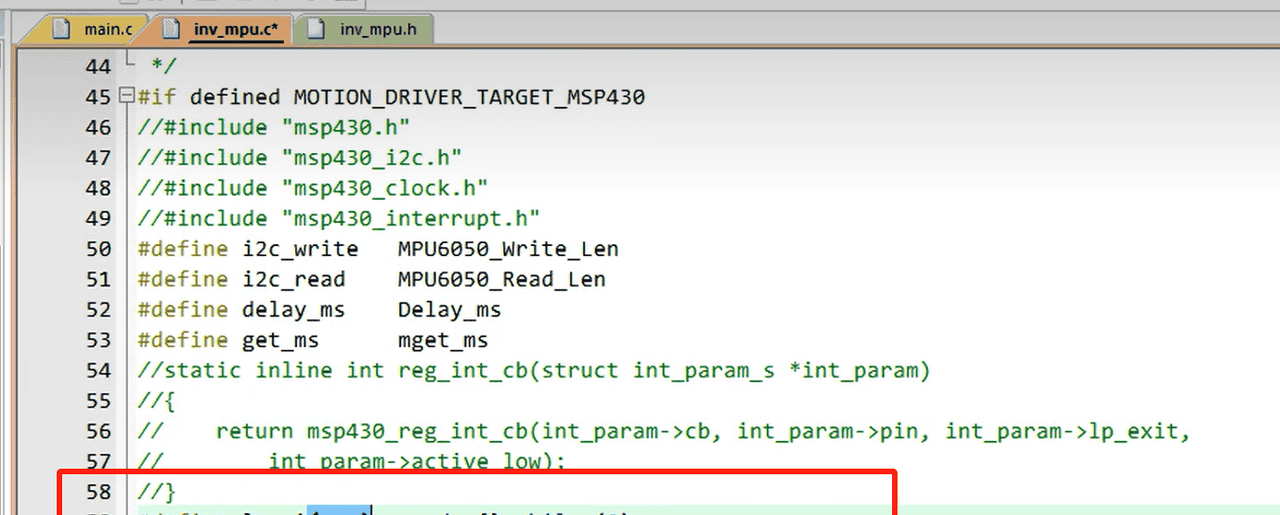
void mget_ms(unsigned long *time);3、注释
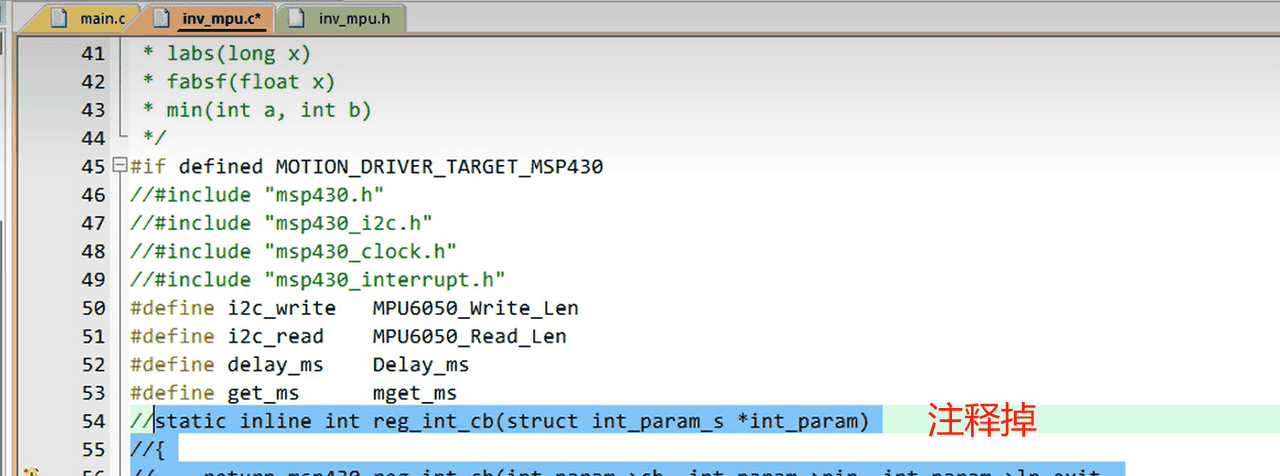
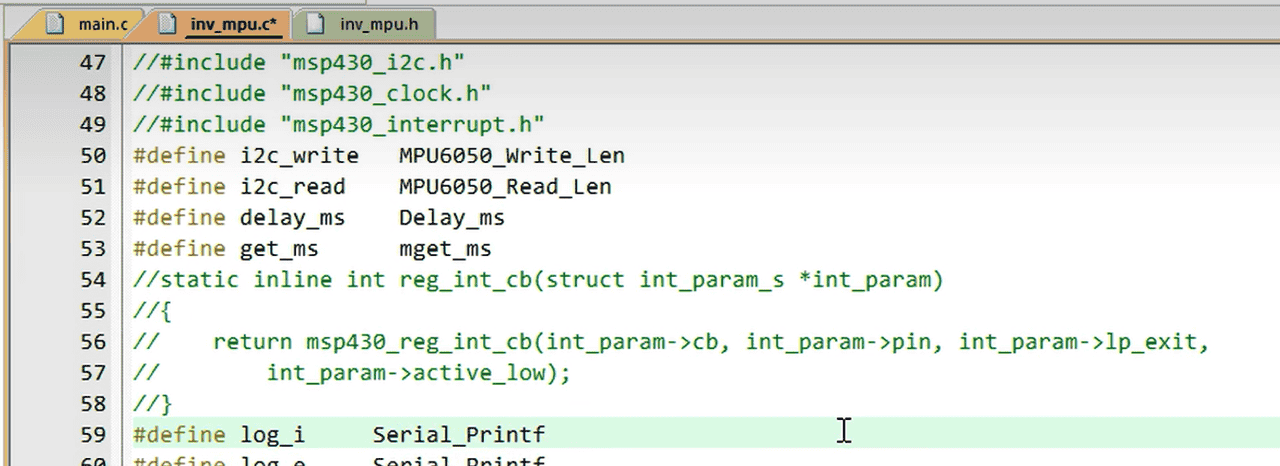
4、printf 换成自己的打印输出函数即可
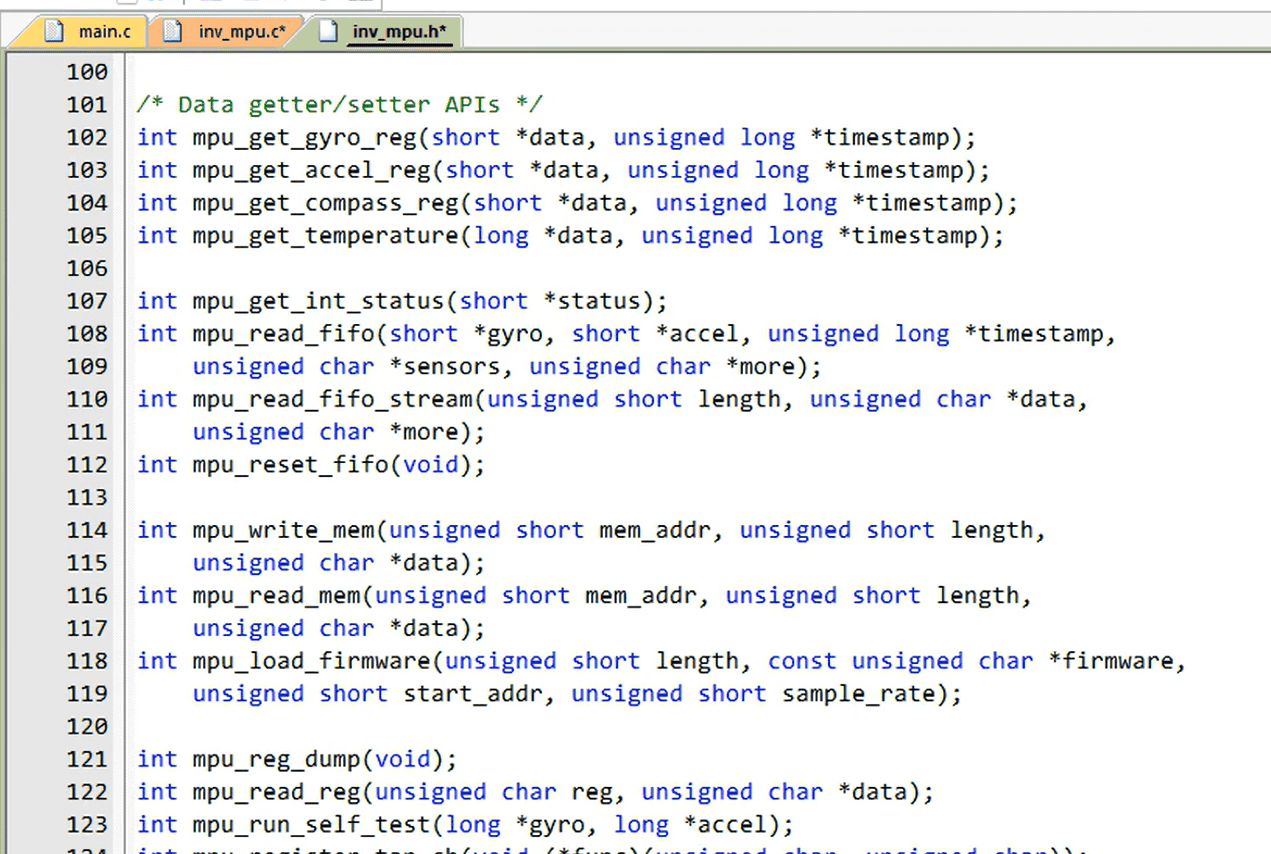
5、初始化函数修改 去掉形参
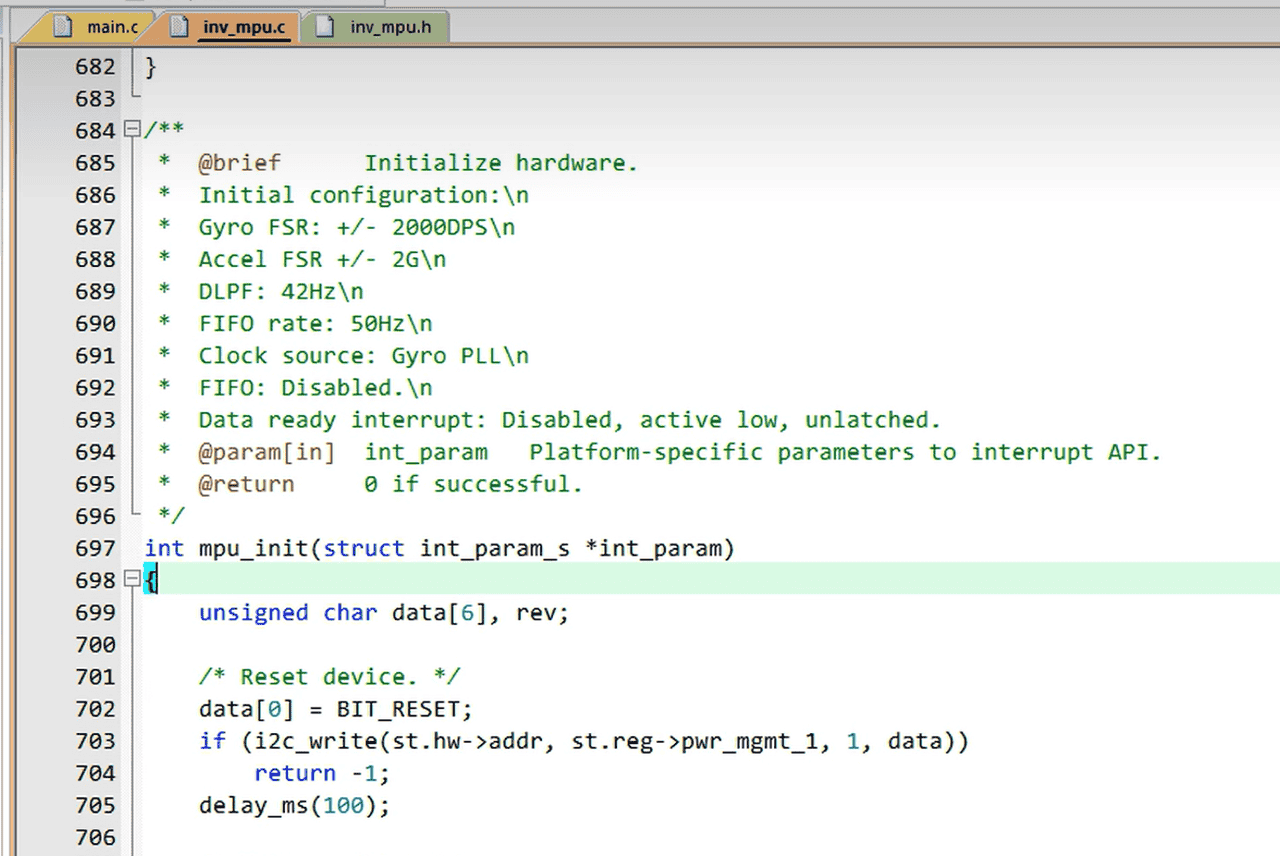
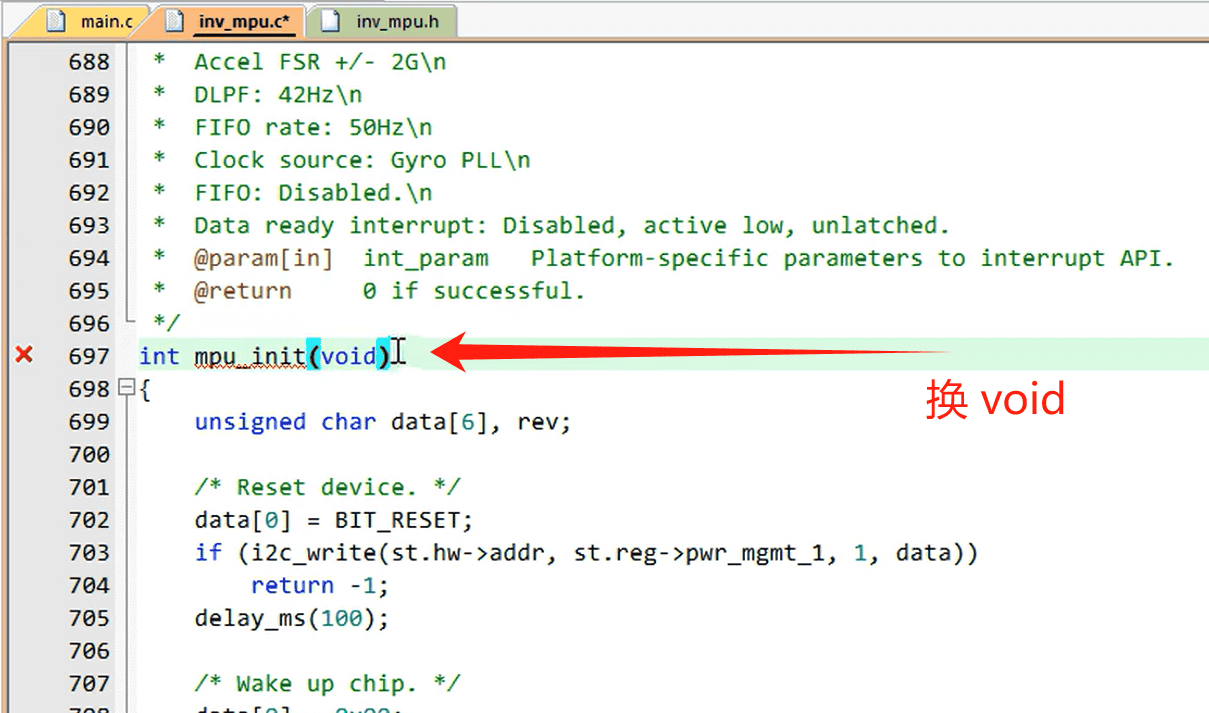
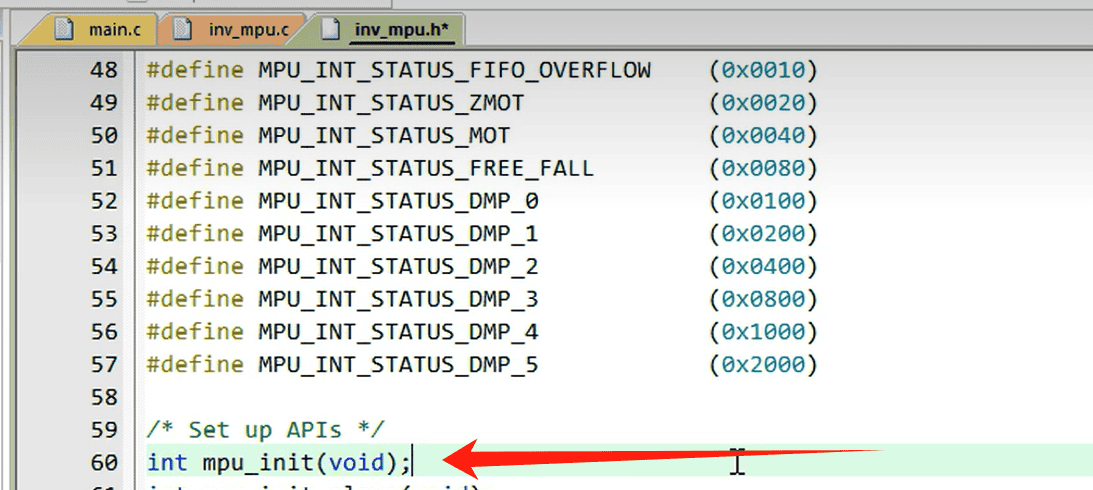
mpu_init头文件也记得修改
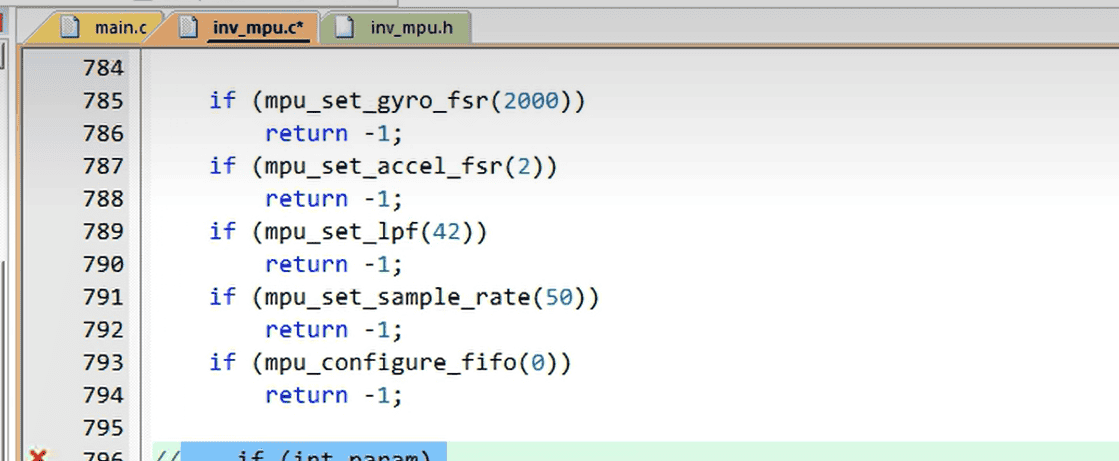
原函数中的这个报错注释掉
inv_mpu.h 修改
1、从inv_mpu.c复制定义过来
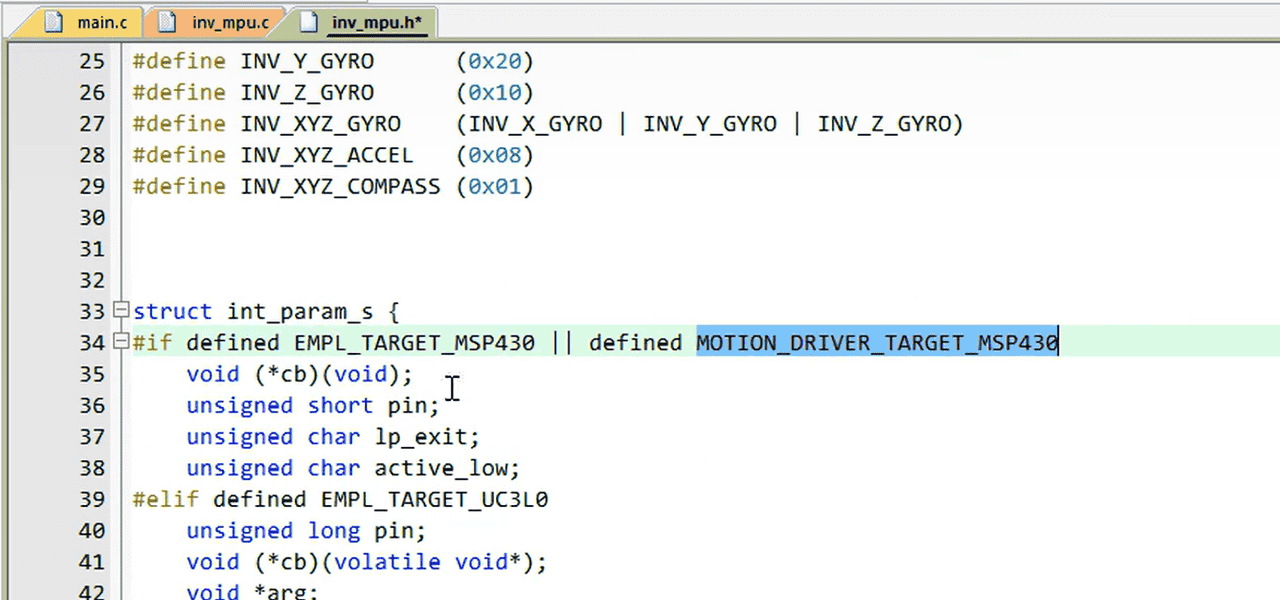
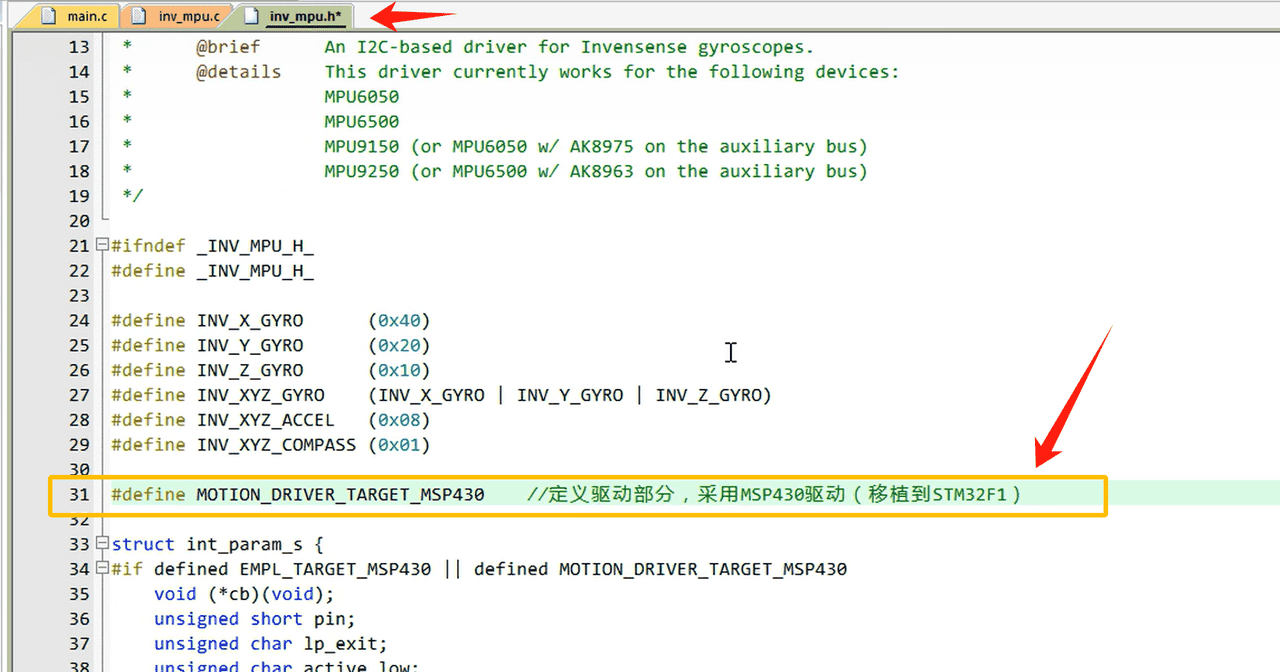
#define MOTION_DRIVER_TARGET_MSP430 //定义驱动部分,采用MSP430驱动(移植到STM32F1)
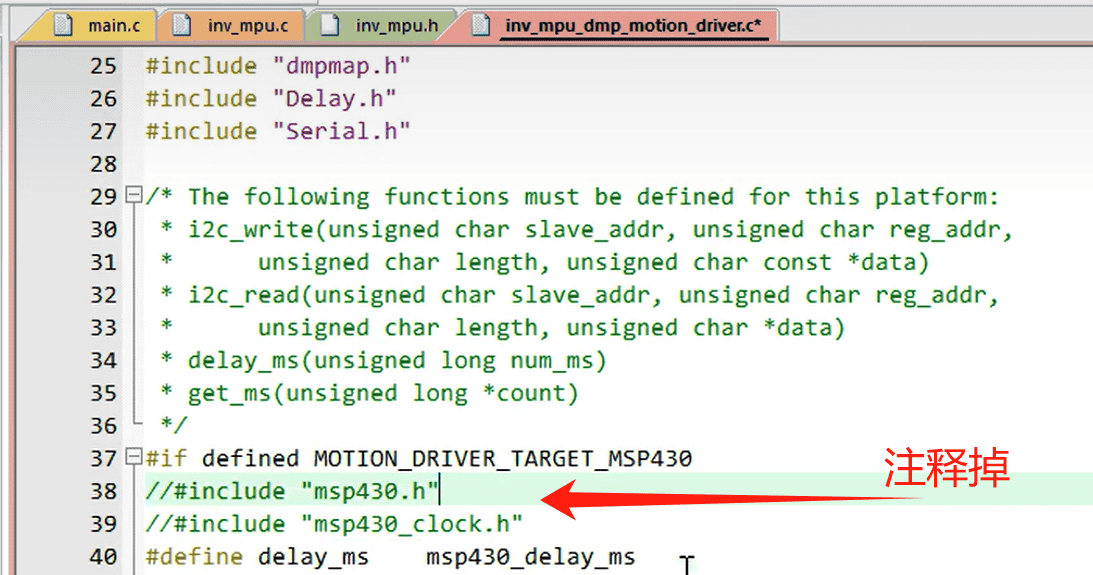
inv_mpu_dmp_motion_driver.c 和.h 修改
1、增加
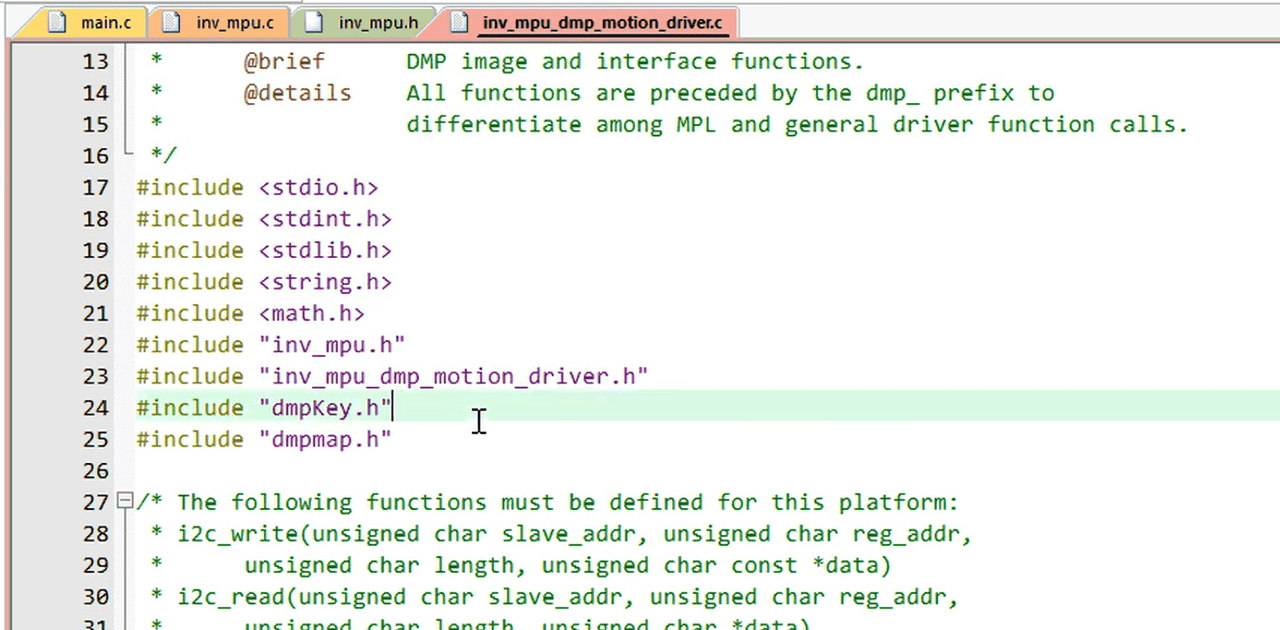
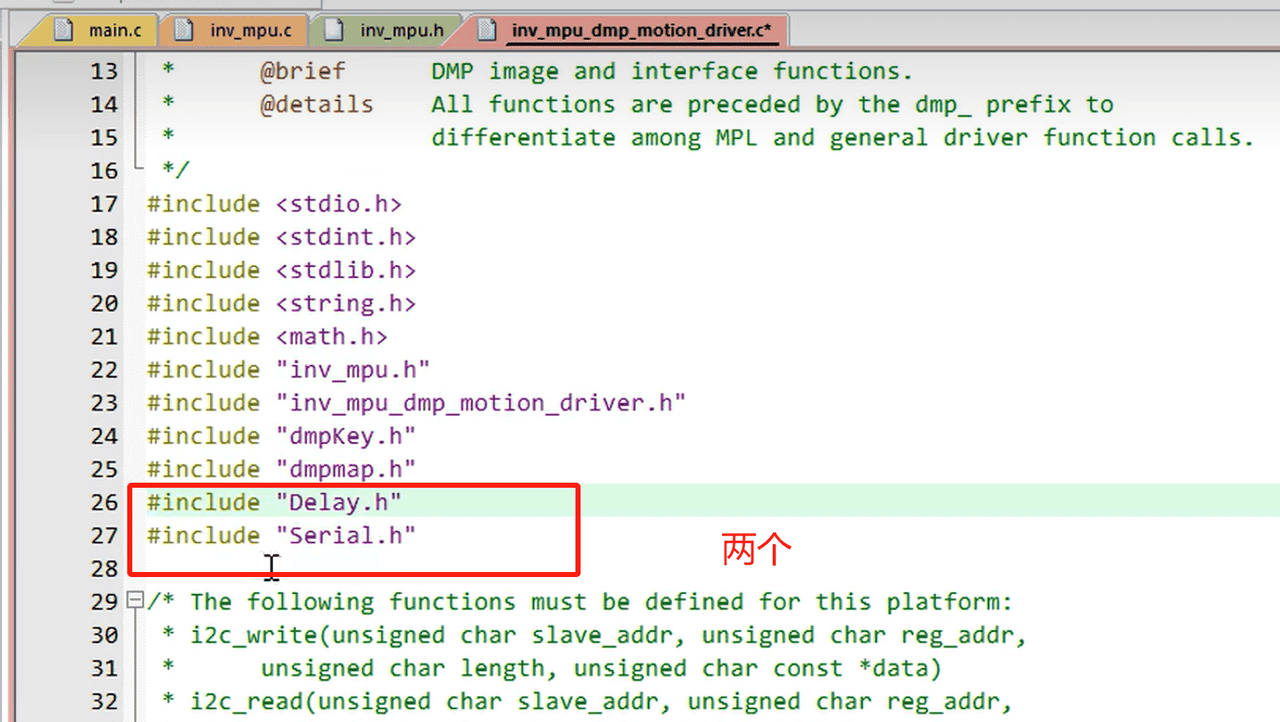
#include "Delay.h"
#include "stdio.h"2、注释和替换
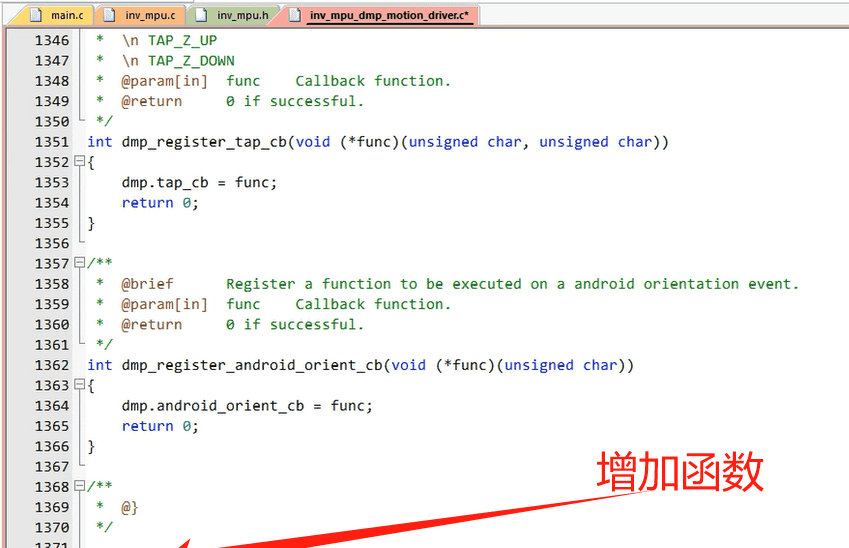
3、增加函数
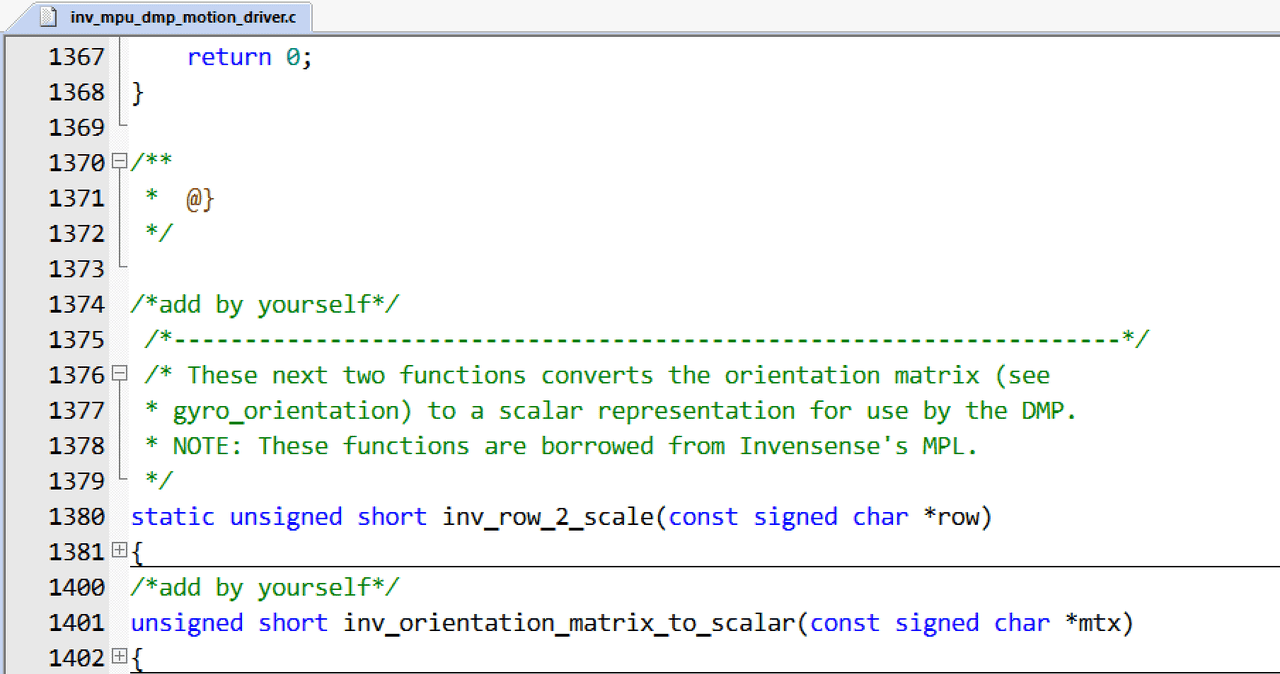
/*add by yourself*/
/*-------------------------------------------------------------------*/
/* These next two functions converts the orientation matrix (see
* gyro_orientation) to a scalar representation for use by the DMP.
* NOTE: These functions are borrowed from Invensense's MPL.
*/
static unsigned short inv_row_2_scale(const signed char *row)
{
unsigned short b;
if (row[0] > 0)
b = 0;
else if (row[0] < 0)
b = 4;
else if (row[1] > 0)
b = 1;
else if (row[1] < 0)
b = 5;
else if (row[2] > 0)
b = 2;
else if (row[2] < 0)
b = 6;
else
b = 7; // error
return b;
}
/*add by yourself*/
unsigned short inv_orientation_matrix_to_scalar(const signed char *mtx)
{
unsigned short scalar;
/*
XYZ 010_001_000 Identity Matrix
XZY 001_010_000
YXZ 010_000_001
YZX 000_010_001
ZXY 001_000_010
ZYX 000_001_010
*/
scalar = inv_row_2_scale(mtx);
scalar |= inv_row_2_scale(mtx + 3) << 3;
scalar |= inv_row_2_scale(mtx + 6) << 6;
return scalar;
}
/*add by yourself*/
unsigned short run_self_test(void)
{
int result;
//char test_packet[4] = {0};
long gyro[3], accel[3];
result = mpu_run_self_test(gyro, accel);
if (result == 0x3)
{
float sens;
unsigned short accel_sens;
mpu_get_gyro_sens(&sens);
gyro[0] = (long)(gyro[0] * sens);
gyro[1] = (long)(gyro[1] * sens);
gyro[2] = (long)(gyro[2] * sens);
dmp_set_gyro_bias(gyro);
mpu_get_accel_sens(&accel_sens);
accel[0] *= accel_sens;
accel[1] *= accel_sens;
accel[2] *= accel_sens;
dmp_set_accel_bias(accel);
return 0;
}else return 1;
}4、把后两个函数加在头文件中
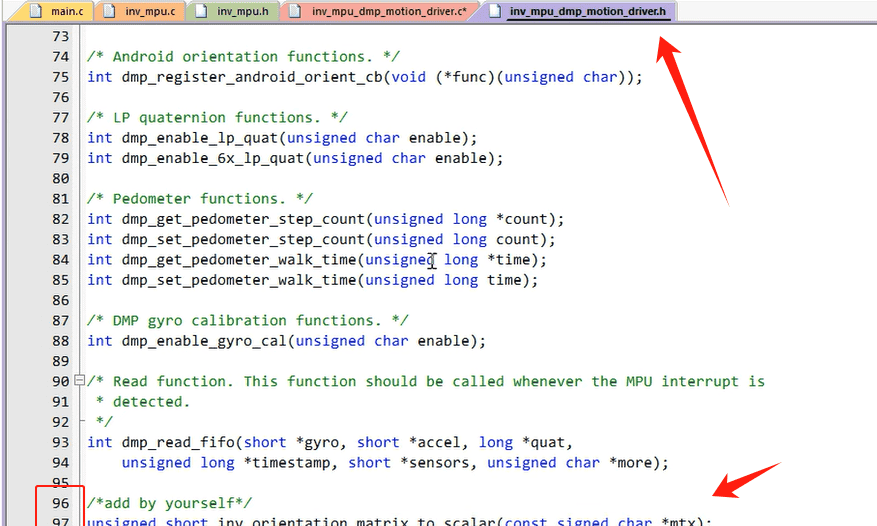
/*add by yourself*/
unsigned short inv_orientation_matrix_to_scalar(const signed char *mtx);
unsigned short run_self_test(void);修改MPU6050.c
1、加头文件
#include "MyI2C.h"
#include "MPU6050_Reg.h"
//下面是加的
#include <math.h>
#include "inv_mpu.h"
#include "inv_mpu_dmp_motion_driver.h"
#include "Serial.h" //#include "stdio.h"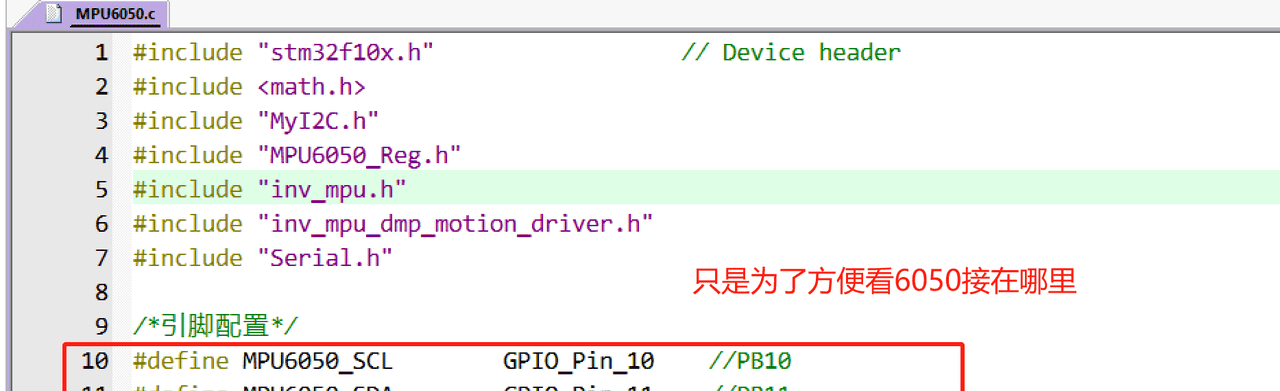
/*引脚配置*/
#define MPU6050_SCL GPIO_Pin_10 //PB10
#define MPU6050_SDA GPIO_Pin_11 //PB112、增加宏定义和部分变量
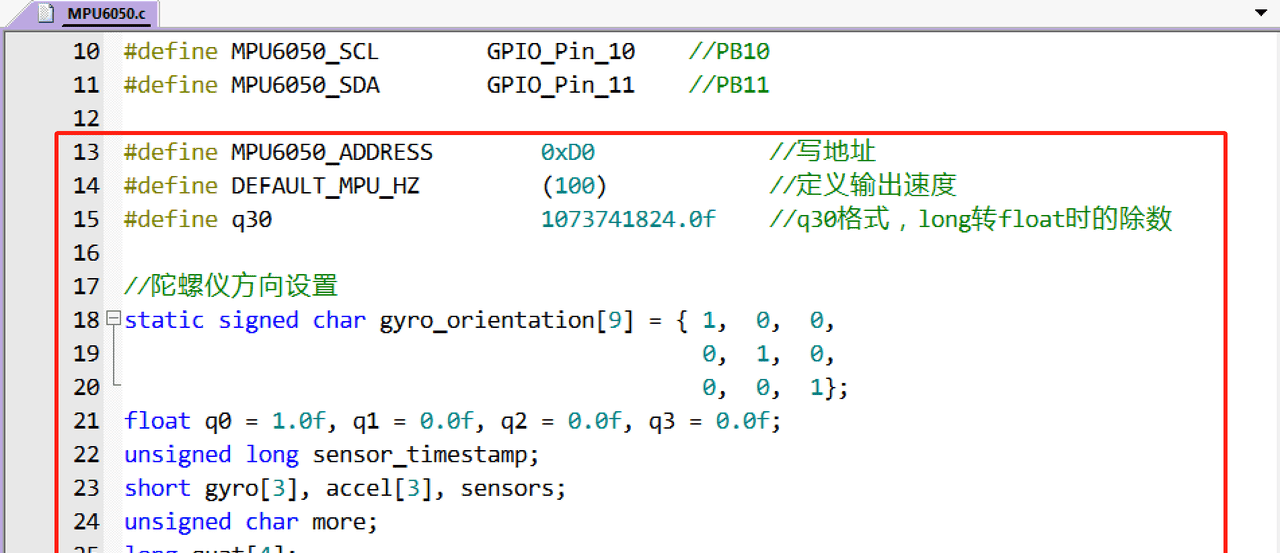
#define MPU6050_ADDRESS 0xD0 //写地址
#define DEFAULT_MPU_HZ (100) //定义输出速度
#define q30 1073741824.0f //q30格式,long转float时的除数
//陀螺仪方向设置
static signed char gyro_orientation[9] = { 1, 0, 0,
0, 1, 0,
0, 0, 1};
float q0 = 1.0f, q1 = 0.0f, q2 = 0.0f, q3 = 0.0f;
unsigned long sensor_timestamp;
short gyro[3], accel[3], sensors;
unsigned char more;
long quat[4];3、增加连续地址写
/**
* @brief MPU6050指定地址连续写字节函数
* @param Addr 器件地址
* @param Reg 寄存器地址
* @param Len 要写入的数据长度
* @param Buf 写入数据的存储区
* @retval 返回0表示正常,其他表示失败
*/
uint8_t MPU6050_Write_Len(uint8_t Addr, uint8_t Reg, uint8_t Len, uint8_t *Buf)
{
MyI2C_Start();
MyI2C_SendByte((Addr << 1) | 0x00); //发送器件地址+写命令
if(MyI2C_ReceiveAck()) //等待应答
{
MyI2C_Stop();
return 1;
}
MyI2C_SendByte(Reg); //写寄存器地址
if(MyI2C_ReceiveAck()) //等待应答
{
MyI2C_Stop();
return 1;
}
while(Len--)
{
MyI2C_SendByte(*Buf++); //发送数据
if(MyI2C_ReceiveAck()) //等待ACK
{
MyI2C_Stop();
return 1;
}
}
MyI2C_Stop();
return 0;
} 4、增加连续地址读
/**
* @brief MPU6050指定地址连续读字节函数
* @param Addr 器件地址
* @param Reg 寄存器地址
* @param Len 要读取的数据长度
* @param Buf 读取数据的存储区
* @retval 返回0表示正常,其他表示失败
*/
uint8_t MPU6050_Read_Len(uint8_t Addr, uint8_t Reg, uint8_t Len, uint8_t *Buf)
{
MyI2C_Start();
MyI2C_SendByte((Addr << 1) | 0x00); //发送器件地址+写命令
if(MyI2C_ReceiveAck())
{
MyI2C_Stop();
return 1;
}
MyI2C_SendByte(Reg); //写寄存器地址
if(MyI2C_ReceiveAck()) //等待应答
{
MyI2C_Stop();
return 1;
}
MyI2C_Start();
MyI2C_SendByte((Addr << 1) | 0x01); //发送器件地址+读命令
if(MyI2C_ReceiveAck()) //等待应答
{
MyI2C_Stop();
return 1;
}
while(Len--)
{
*Buf++ = MyI2C_ReceiveByte(); //读数据
if(Len) {MyI2C_SendAck(0);} //发送ACK
else {MyI2C_SendAck(1);} //发送nACK
}
MyI2C_Stop();
return 0;
}5、增加 MPU6050_DMPInit()初始化函数
/**
* @brief DMP初始化函数
* @param 无
* @retval 无
*/
void MPU6050_DMPInit(void)
{
uint8_t res = 0;
MyI2C_Init();
res = mpu_init();
if(!res)
{
Serial_Printf("mpu initialization complete ......
");
//设置所需要的传感器
res = mpu_set_sensors(INV_XYZ_GYRO | INV_XYZ_ACCEL);
if(!res)
Serial_Printf("mpu_set_sensor complete ......
");
else
Serial_Printf("mpu_set_sensor come across error ......
");
//设置FIFO
res = mpu_configure_fifo(INV_XYZ_GYRO | INV_XYZ_ACCEL);
if(!res)
Serial_Printf("mpu_configure_fifo complete ......
");
else
Serial_Printf("mpu_configure_fifo come across error ......
");
//设置采样率
res = mpu_set_sample_rate(DEFAULT_MPU_HZ);
if(!res)
Serial_Printf("mpu_set_sample_rate complete ......
");
else
Serial_Printf("mpu_set_sample_rate come across error ......
");
//加载DMP固件
res = dmp_load_motion_driver_firmware();
if(!res)
Serial_Printf("dmp_load_motion_driver_firmware complete ......
");
else
Serial_Printf("dmp_load_motion_driver_firmware come across error ......
");
//设置陀螺仪方向
res = dmp_set_orientation(inv_orientation_matrix_to_scalar(gyro_orientation));
if(!res)
Serial_Printf("dmp_set_orientation complete ......
");
else
Serial_Printf("dmp_set_orientation come across error ......
");
//设置DMP功能
res = dmp_enable_feature(DMP_FEATURE_6X_LP_QUAT | DMP_FEATURE_TAP |
DMP_FEATURE_ANDROID_ORIENT | DMP_FEATURE_SEND_RAW_ACCEL | DMP_FEATURE_SEND_CAL_GYRO |
DMP_FEATURE_GYRO_CAL);
if(!res)
Serial_Printf("dmp_enable_feature complete ......
");
else
Serial_Printf("dmp_enable_feature come across error ......
");
//设置DMP输出速率(最大不超过200Hz)
res = dmp_set_fifo_rate(DEFAULT_MPU_HZ);
if(!res)
Serial_Printf("dmp_set_fifo_rate complete ......
");
else
Serial_Printf("dmp_set_fifo_rate come across error ......
");
//自检
res = run_self_test();
if(!res)
Serial_Printf("mpu_run_self_test complete ......
");
else
Serial_Printf("mpu_run_self_test come across error ......
");
//使能DMP
res = mpu_set_dmp_state(1);
if(!res)
Serial_Printf("mpu_set_dmp_state complete ......
");
else
Serial_Printf("mpu_set_dmp_state come across error ......
");
}
else
{
Serial_Printf("mpu initialization come across error ......
");
while(1);
}
}6、MPU6050_ReadDMP
/**
* @brief 获取DMP处理后数据函数
* @param Pitch 俯仰角,精度:0.1°,范围:-90.0° ~ +90.0°
* @param Roll 横滚角,精度:0.1°,范围:-180.0°~ +180.0°
* @param yaw 偏航角,精度:0.1°,范围:-180.0°~ +180.0°
* @retval 返回0表示正常,其他表示失败
*/
uint8_t MPU6050_ReadDMP(float *Pitch, float *Roll, float *Yaw)
{
if(dmp_read_fifo(gyro, accel, quat, &sensor_timestamp, &sensors, &more)) return 1;
if(sensors & INV_WXYZ_QUAT)
{
q0 = quat[0] / q30; //q30格式转换为浮点数
q1 = quat[1] / q30;
q2 = quat[2] / q30;
q3 = quat[3] / q30;
//计算得到俯仰角、横滚角和偏航角
*Pitch = asin(-2 * q1 * q3 + 2 * q0 * q2) * 57.3;
*Roll = atan2(2 * q2 * q3 + 2 * q0 * q1, -2 * q1 * q1 - 2 * q2 * q2 + 1) * 57.3;
*Yaw = atan2(2 * q1 * q2 + 2 * q0 * q3, -2 * q2 * q2 - 2 * q3 * q3 + 1) * 57.3;
}else return 2;
return 0;
}7、MPU6050.h 中增加函数声明
uint8_t MPU6050_Write_Len(uint8_t Addr, uint8_t Reg, uint8_t Len, uint8_t *Buf);
uint8_t MPU6050_Read_Len(uint8_t Addr,uint8_t Reg,uint8_t Len,uint8_t *Buf);
void MPU6050_DMPInit(void);
uint8_t MPU6050_ReadDMP(float *Pitch, float *Roll, float *Yaw);主函数中初始化修改
MPU6050_DMPInit(); // MPU6050_Init(); 编译后的报错解决
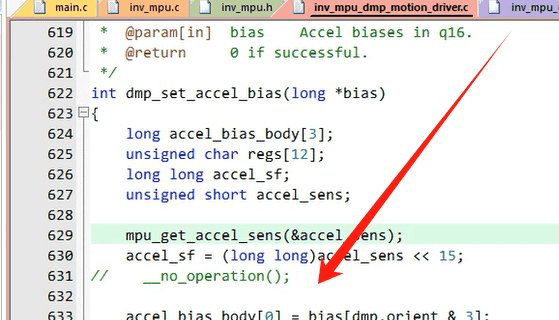
1、注释
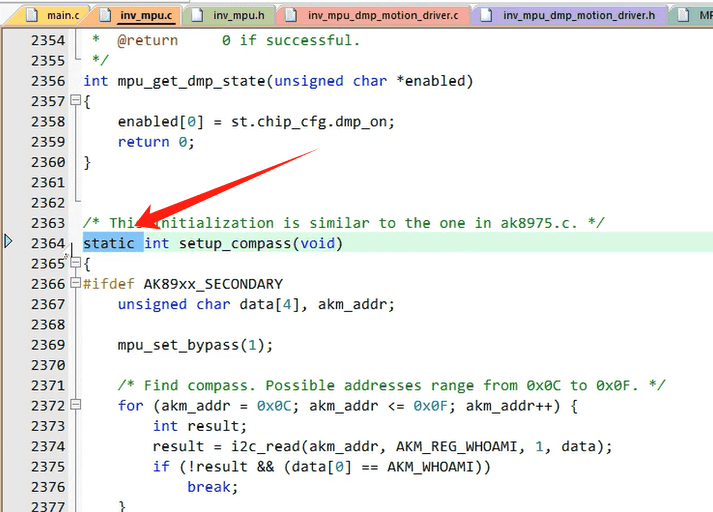
2、删除 static
3、如果出现这个关于报错,
warning: #223-D: function “Serial_Printf” declared implicitly
Error: L6218E: Undefined symbol Serial_Printf (referred from mpu6050.o).
这是因为 void MPU6050_DMPInit(void) 这个函数中是用的 Serial_Printf,你可以加一条宏定义,把你的printf改个名字即可,如下
#define Serial_Printf printf这样一来,代码中所有的
都会在编译时被自动替换为
Serial_Printf,无需修改原代码中的任何函数调用,直接复用即可,且底层依然使用你原来的
printf实现。
printf或者把原函数中所有的
Serial_Printf替换为printf也是OK的
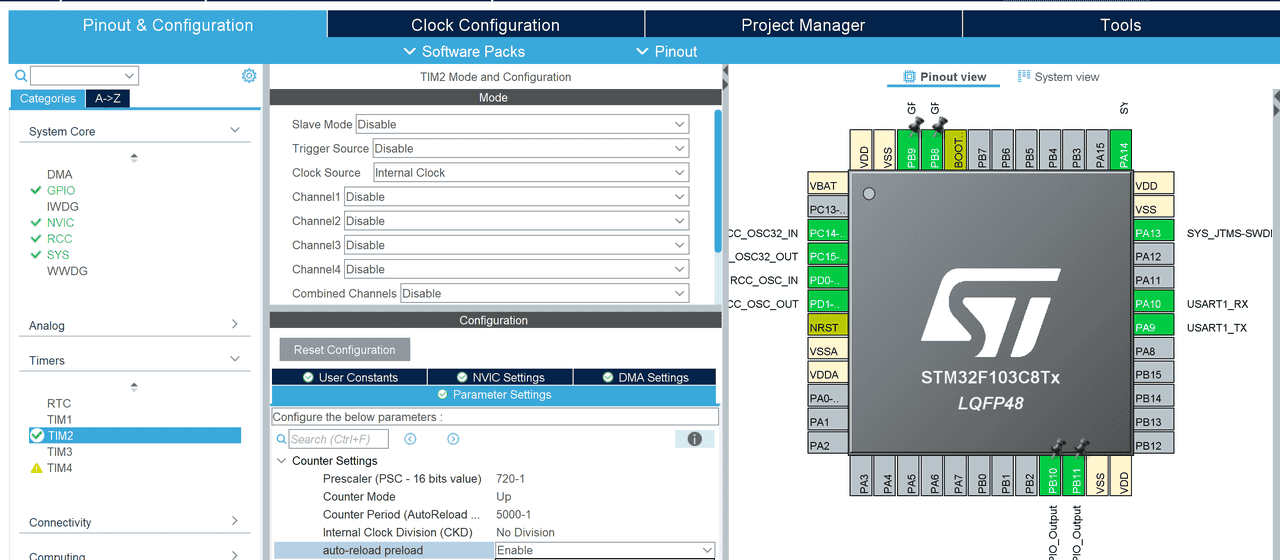
定时器的配置,一般20Hz就可以,根据自己的需求调整吧
这里提供标准库的time文件
#include "stm32f10x.h" // Device header
/**
* @brief 定时器初始化函数,初始化TIM2为使用内部时钟的50ms定时器
* @param 无
* @retval 无
*/
void Timer_Init(void)
{
//配置RCC
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //通用计时器TIM2
//选择时钟
TIM_InternalClockConfig(TIM2); //内部时钟
//配置时基单元,20Hz,Feq = 72M / (PSC + 1) / (ARR + 1)
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //不分频
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
TIM_TimeBaseInitStructure.TIM_Period = 5000 - 1; //ARR自动重装器值
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //PSC预分频器值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器值(高级定时器)
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
//配置中断
TIM_ClearFlag(TIM2, TIM_FLAG_Update); //防止复位后立刻进入中断,清除中断标志位
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); //使能TIM2更新中断
//配置NVIC
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //分组2:2位抢占优先级,2位响应优先级
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //抢占优先级2
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //响应优先级1
NVIC_Init(&NVIC_InitStructure);
//使能定时器
TIM_Cmd(TIM2, ENABLE);
}
/**
* @brief TIM2定时中断函数,复制到main
* @param 无
* @retval 无
*/
//void TIM2_IRQHandler(void)
//{
// if(TIM_GetITStatus(TIM2, TIM_IT_Update) == SET) //判断是否为定时器TIM2更新中断
// {
//
// TIM_ClearITPendingBit(TIM2, TIM_IT_Update); //清除定时器TIM2更新中断标志位
// }
//}HAL库的配置是这样的,记得开启中断
定时器中断函数里面进行数据的更新
这是标准库的:
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2, TIM_IT_Update) == SET) //判断是否为定时器TIM2更新中断
{
MPU6050_ReadDMP(&Pitch, &Roll, &Yaw);
TIM_ClearITPendingBit(TIM2, TIM_IT_Update); //清除定时器TIM2更新中断标志位
}
}HAL 写在回调函数里面:HAL库中不用手动删除标志位,会自动进行的
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim == (&htim2))
{
MPU6050_ReadDMP(&Pitch, &Roll, &Yaw);
// TIM_ClearITPendingBit(TIM2, TIM_IT_Update); //清除定时器TIM2更新中断标志位
}
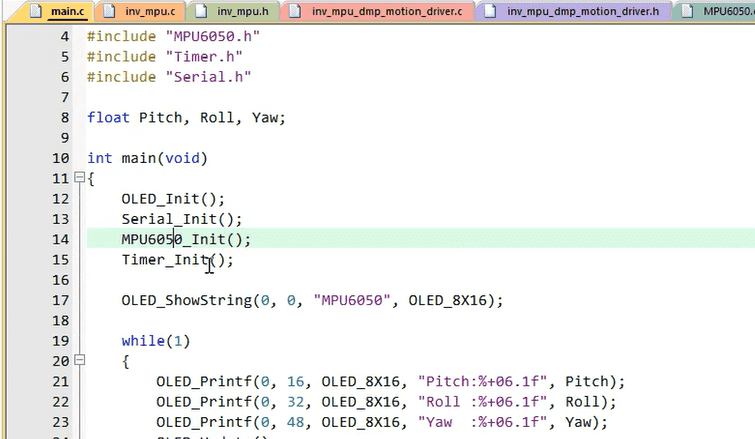
}主函数及相关变量的定义
float Pitch, Roll, Yaw;部分:
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
OLED_Init();
MPU6050_DMPInit(); // MPU6050_Init();
HAL_TIM_Base_Start_IT(&htim2); //中断开启
OLED_ShowString(0, 0, "MPU6050", OLED_8X16);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
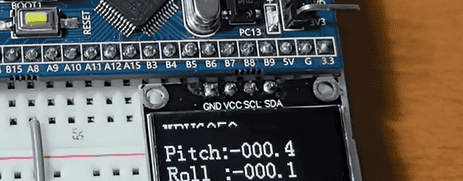
OLED_Printf(0, 16, OLED_8X16, "Pitch:%+06.1f", Pitch);
OLED_Printf(0, 32, OLED_8X16, "Roll :%+06.1f", Roll);
OLED_Printf(0, 48, OLED_8X16, "Yaw :%+06.1f", Yaw);
OLED_Update();
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
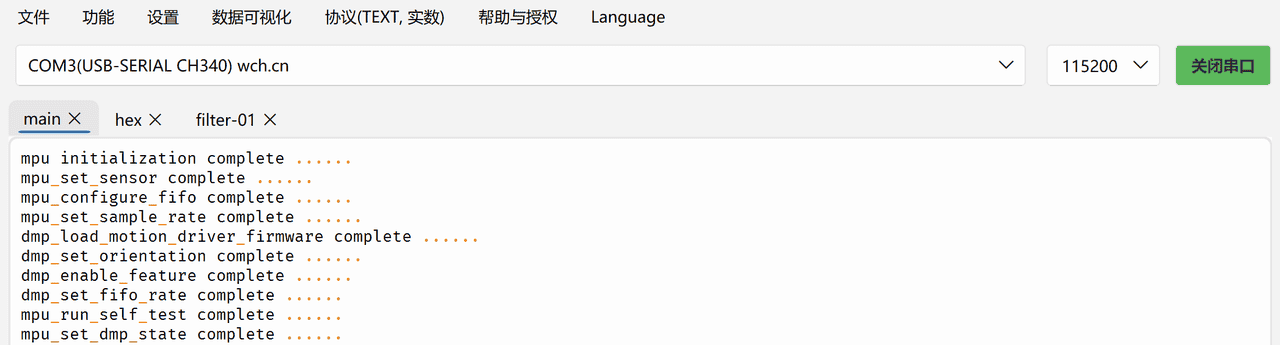
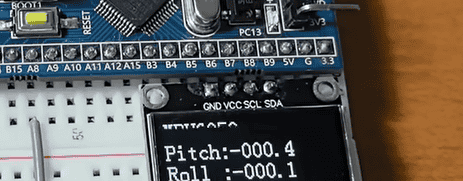
}效果:
串口打印初始化过程:
F130C8T6工程源码
通过网盘分享的文件:F103实现MPU6050姿态解算.zip
链接: https://pan.baidu.com/s/1OcGkWF7jUM5deZul_n4itg 提取码: clq1
–来自百度网盘超级会员v5的分享




















暂无评论内容